At the beginning of summer, I wrote up a quick report of some experimentation with Maxon’s DEC Module. In short, they’re bite-sized little BLDC motor control boards which can run up to 50 volts and 5 continuous amps. They have real current control and also can perform closed loop speed control. Overall, I’ve found them very versatile and useful. Four DECs have now logged several whole miles!!! in the RazErBlades.
I’m always out for more amps, however. The DEC is marketed as a 5 amp controller, but it will gladly hold currents of 10 amps forever, as I found out in the ‘blades. As that post addressed, it isn’t the semiconductor which is a limit to the DEC’s output power. The FETs, while small physically, only have about 6 milliohms of resistance when switched on The gate drive itself is also fairly well matched to the FETs. It’s just Maxon’s well-known conservative rating for their parts, which probably contributes to their reliability significantly.
But what this really means is that a 10 amp Maxon controller should be capable of about 195,000 amps in reality[citation needed].
Well, 20 is close enough to 195,000. Can you spot the hack?
…
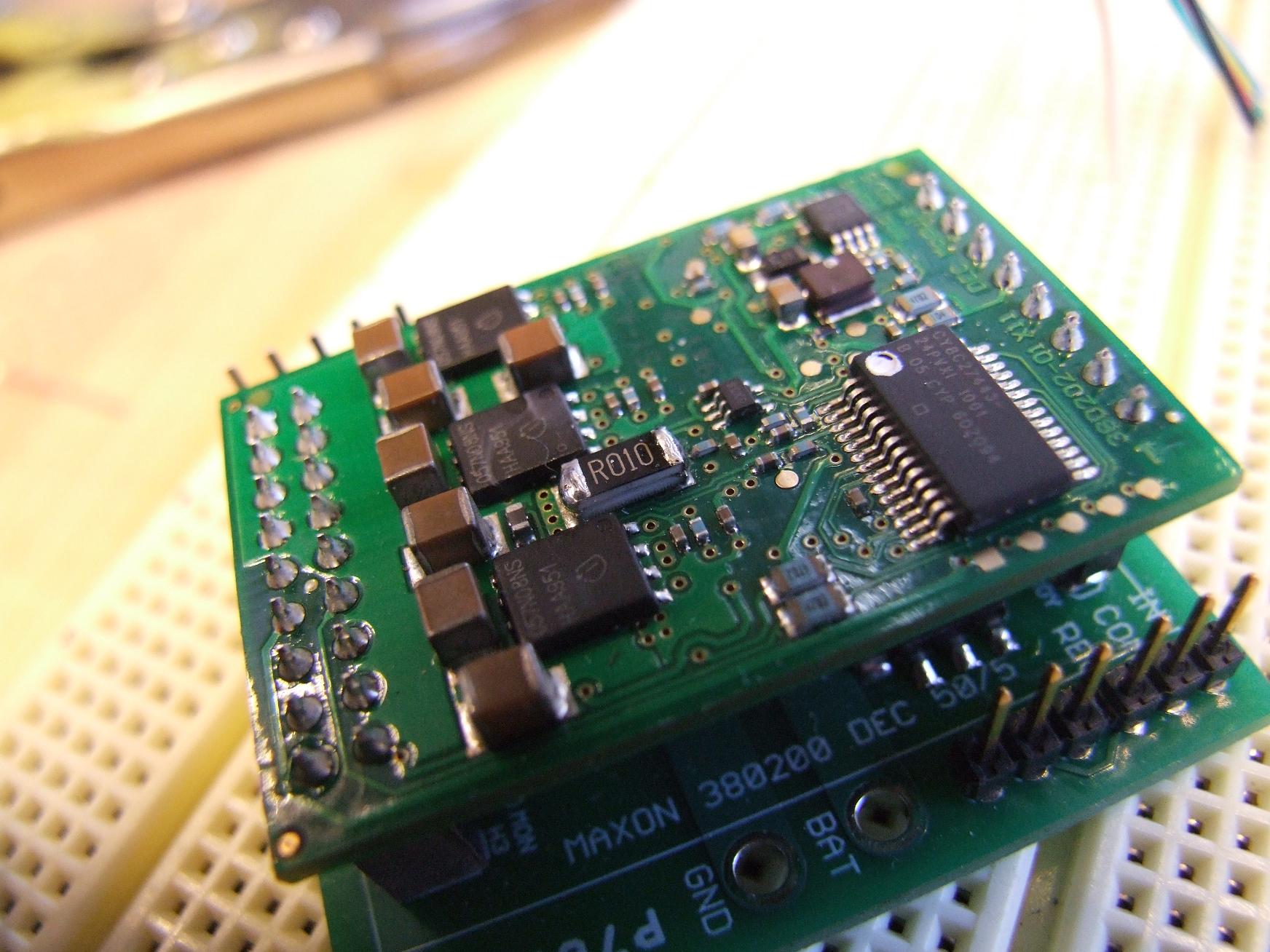
It’s the lamest thing ever. I just piled another current sense resistor in parallel with the one already on there. The DEC uses a 10 milliohm 2010 package SMT resistor. A compatible one is this, from Digikey.
What’s that cute little PCB the DEC is mounted to?
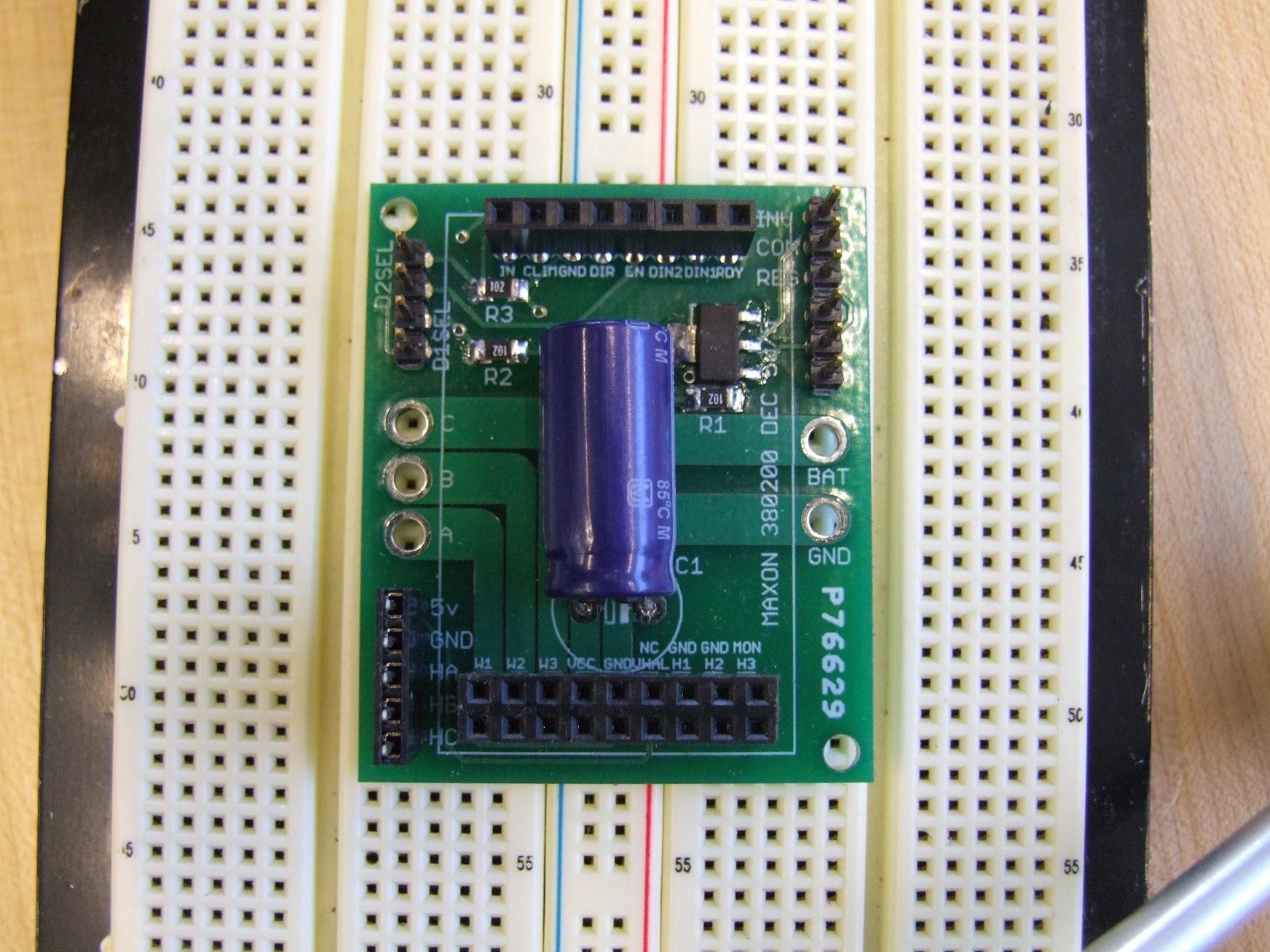
Like the RazErDEC and Double DEC’er board, it’s designed to hold a DEC module and provide some glue circuitry. Unlike those two, however, it’s a bit more “general purpose”. I lead the D2 and D1 mode pins out to their own header for setting closed loop speed. I also threw in a selectable inverting circuit which flips the state of the REVERSE pin, in case the motor is happy running backwards when you really want it to run forwards. Otherwise, it has the analog throttle and digital reverse pins brought out to another header. There’s also a supplemental bus capacitor.
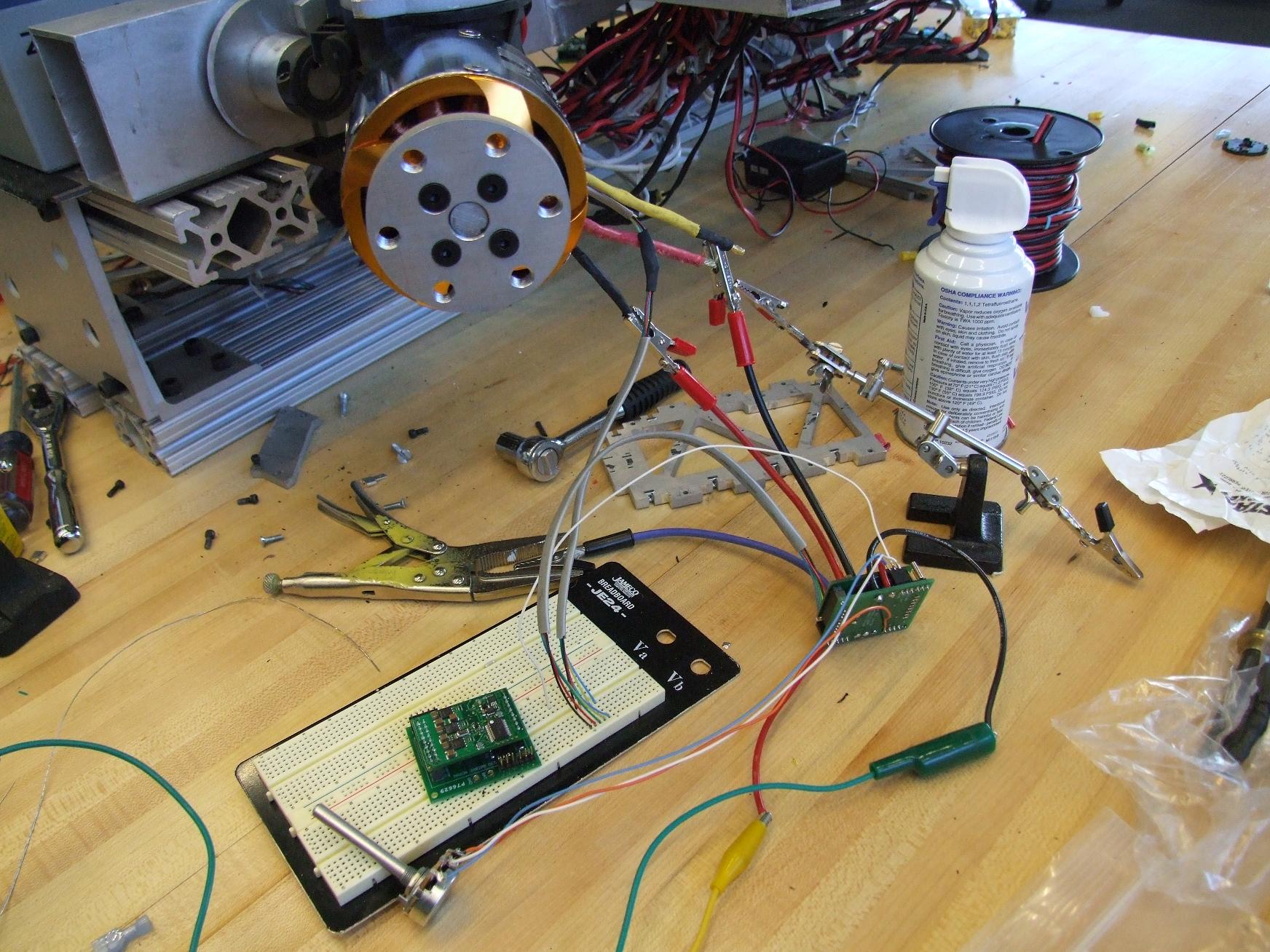
The “killer app” for this board so far is the model CityCar at the Media Lab…
Yes, those are Turnigy Short Melons attached to the Epic Robotic Steering Arms.
Moving on… The DECs are currently a stopover solution as we ditch the flakey Kelly KBS controllers and eventually move onto a fully integrated control solution involving the Hexbridge Shield.
pushing the limits
Now, realistically speaking, I don’t expect the DECs to survive at the full 50 volts and 20 amps. The FET package is simply not designed for high power. The model CityCar will only be running 12 volts, which (while admittedly a bit of a waste of the Melon’s potential – it’s being used for form factor, not power) eases the power handling of the boards significantly.
I expect if I’m actually to use the DECs at 20 amps for any length of time (e.g. for the new RazEr) I’d have to come up with a heat sinking solution. There’s many components on the power side of the board which are taller than the FETs, so it’ll involve some creative layout for certain. I’ll probably have to remove one or two of the large blocky capacitors onboard – which is fine as long as I provide it additional buscap anyway.