It’s getting closer.

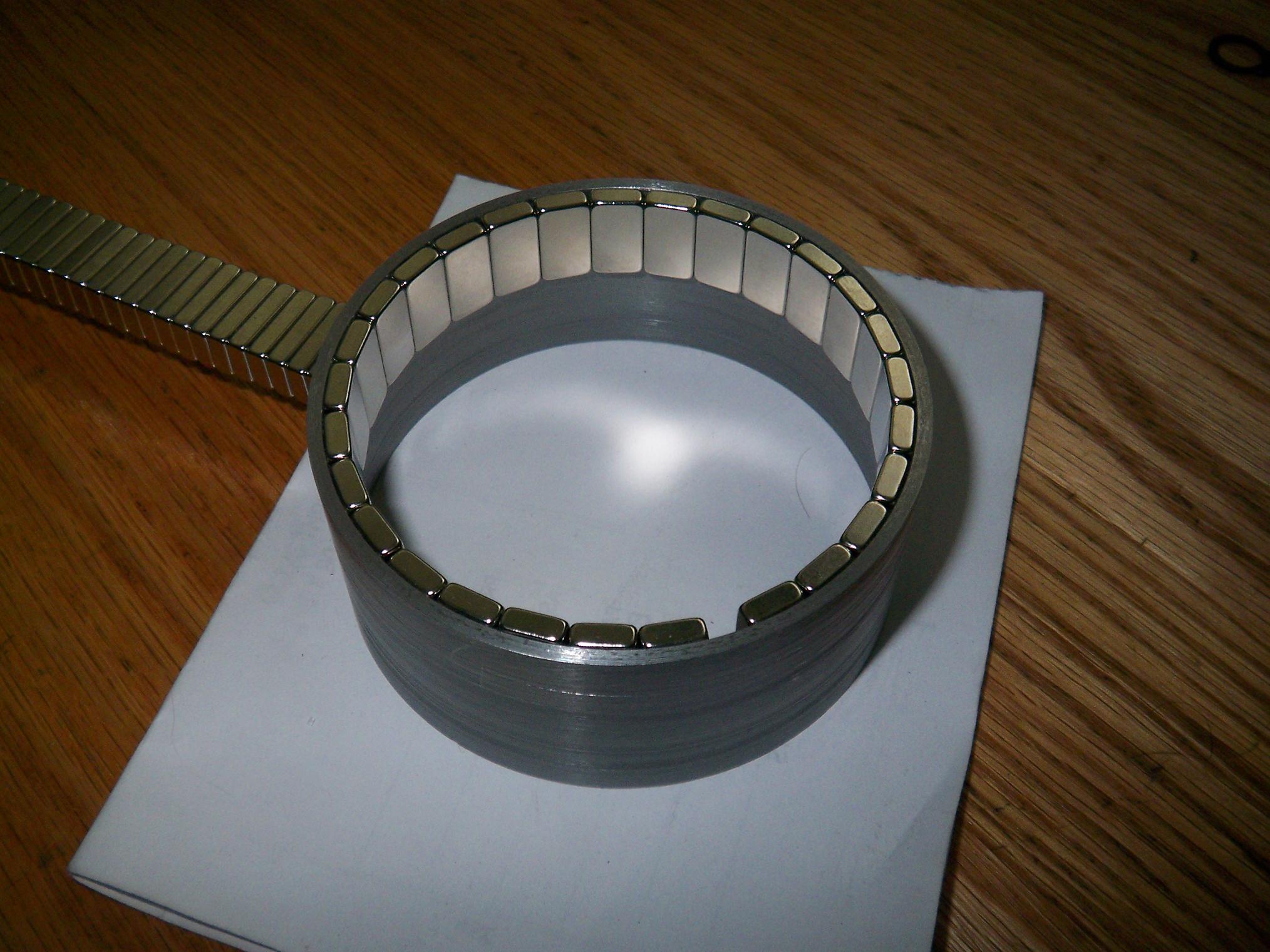
In the last episode, the can was filled with magnets and the stator was test wound. I settled on 25 turns per tooth, distributed LRK style, as a starting point, and proceeded to wind the whole thing.

And here it is. This took quite a bit of time, as I had to make about 300 little wire loops in total and make sure they’re all aligned and not overlapping as to have the maximum space efficiency.
I initially bolted the stator to the end of a metal flat clamped to a table so I could tug a bit harder. After it took an hour to do half of one phase and after I discovered I could go much faster and pack as well by hand, I ditched it.
One quirk about the LRK scheme is that one phase is wound from the opposite side of the stator from the other two. I neglected that fact, and while it doesn’t impact the performance of the motor in any way, makes my termination slightly inconsistent, resulting in the need to fudge a bit to link the common ends of the windings. So… yeah, start the bB phase from the other side.
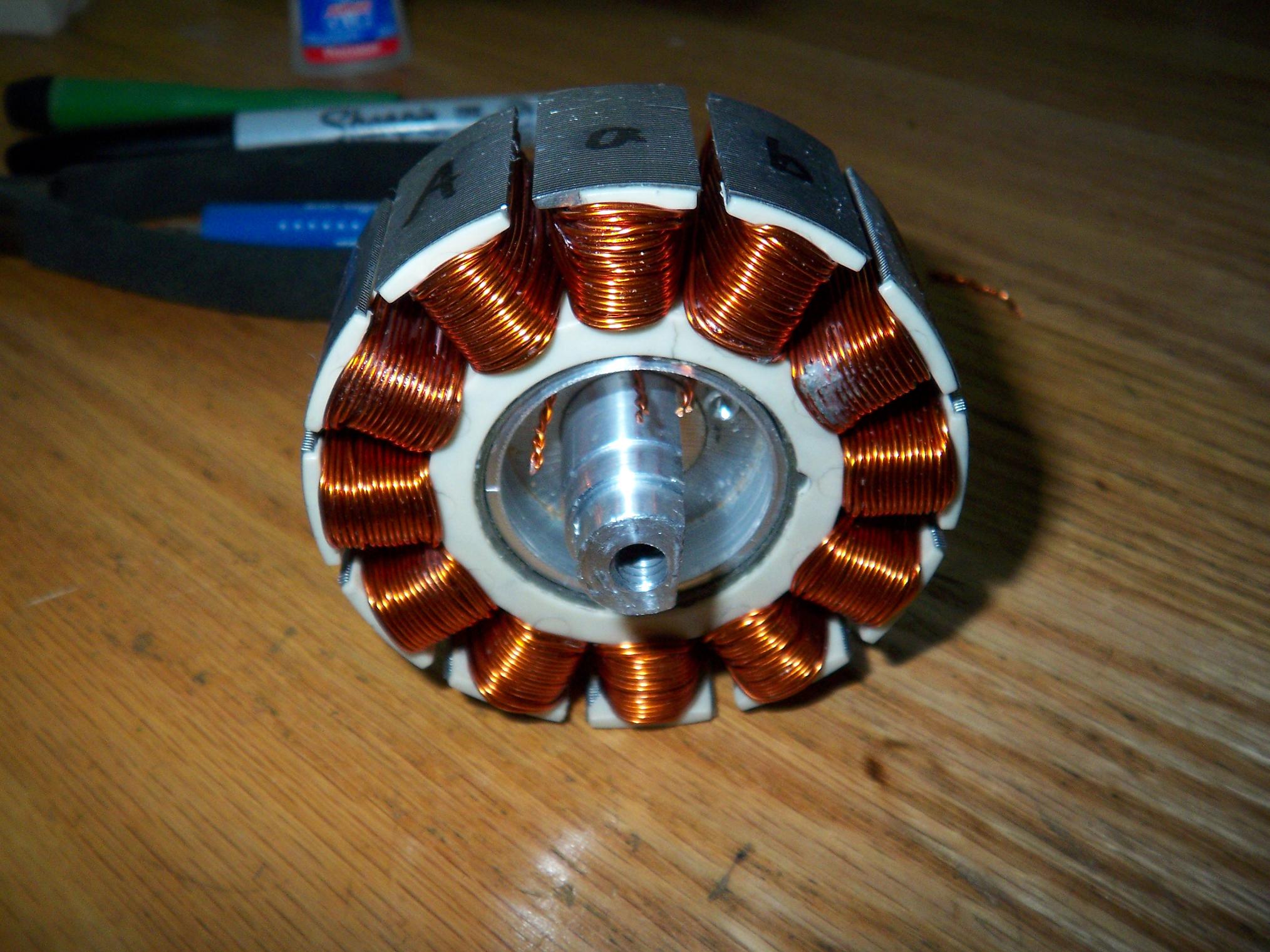
From the other side. The terminations exit from 3 holes drilled in the core mount thing, and then through the space between the motor bearing and the shaft flat. I found that this was a better way to do it than running everything through the center of the shaft.

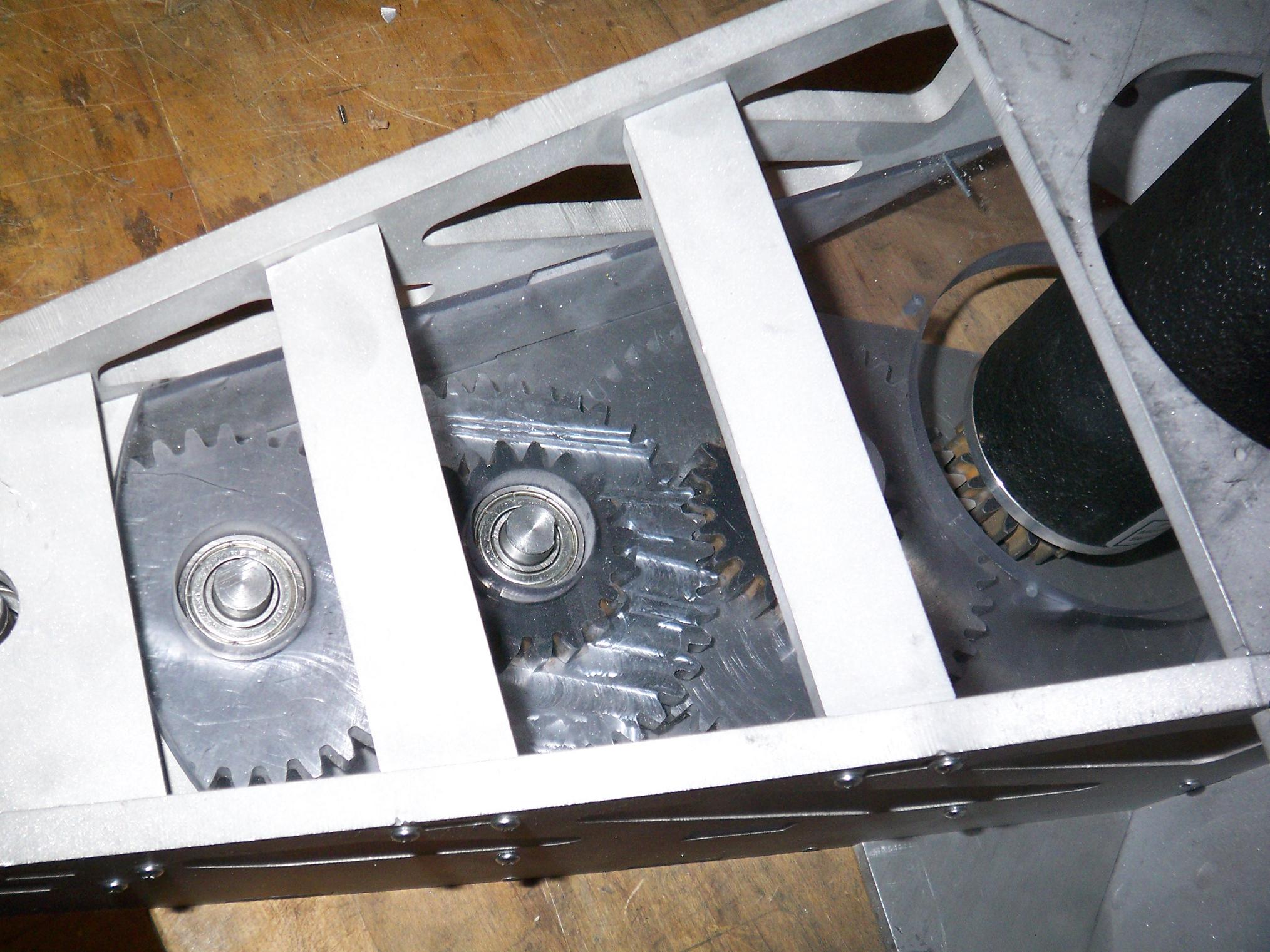
So after the pigtails were soldered on and everything secured by a good helping of epoxy, it was time to drop the stator in. This was not trivial, because I could not hold onto the thing while they were being brought together since the magnetic pull was so strong.
In the end, a giant vise and the quill of a drill press came to the rescue. It may pull hard, but not hard enough to overcome a 50 pound vise.
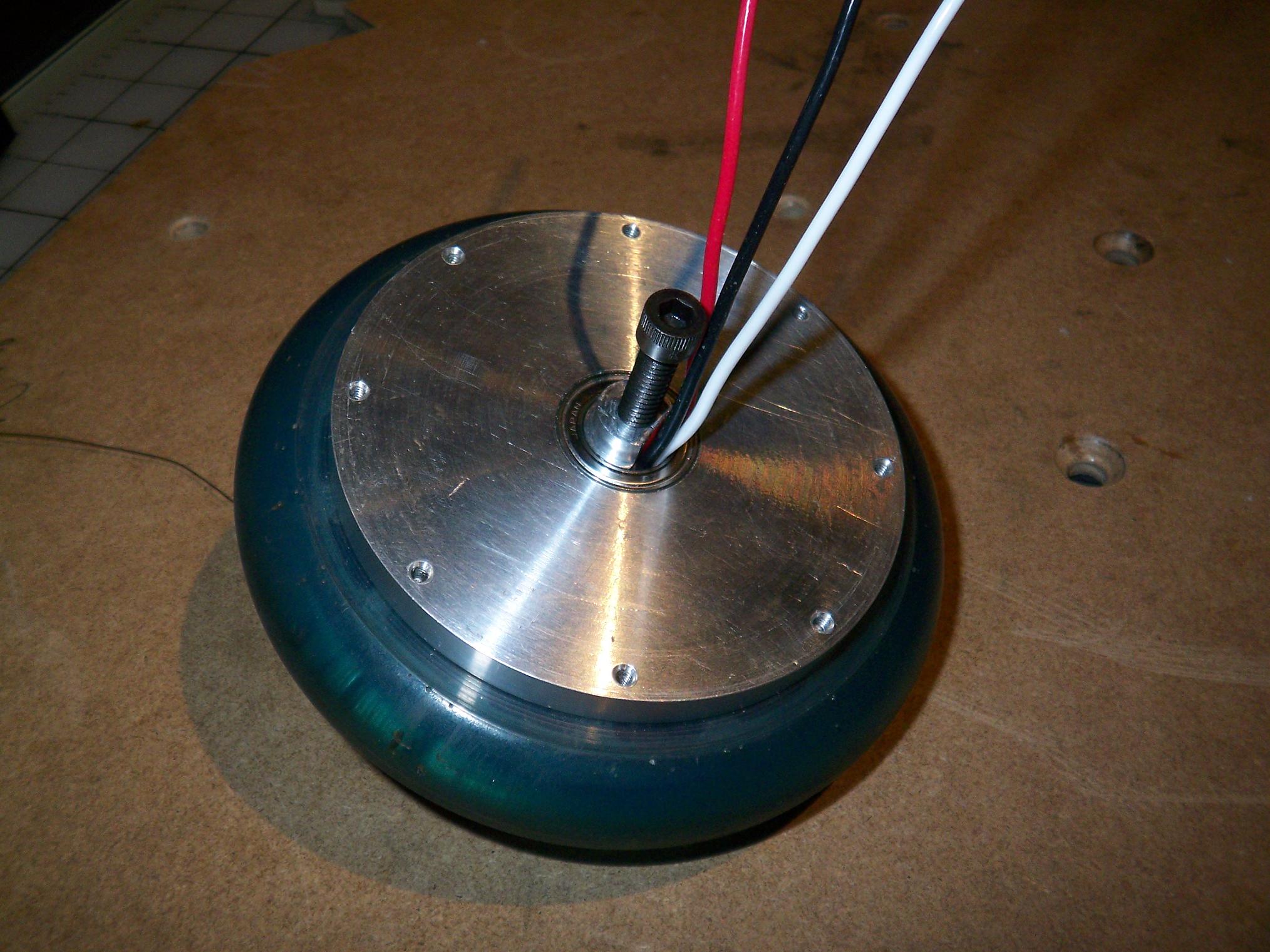
Completed motor, side one…

Completed motor, side 2.

So now that it was put together, it was time for a test run. Of course, I neglected to bring my stator mounting pole back with me from MITERS, so I bolted it to the nearest object that had a 1/4″ hole in it.
Conveniently, it was my Institvte-provided bedframe. This brings up great visions of motorized furniture, but that’s another project for another day.
Here’s a video of the first firing of the motor. It’s a bit choppy – One of the side plates is not a good press fit, which, along with the poor molding tolerances of the wheel, caused the side place to mount a bit off-axis.
Using a drill motor with a wheel, I was able to calculate how fast the wheelmotor was rotating at a given drill motor voltage, and correlate it with the AC voltage it was producing at the leads. This gave me a working value for the voltage vonstant Kv, which tells how fast the motor turns given a certain voltage and an unlimited power source.
I worked out the number to be around 65, since it should have been rotating about 306 RPM given my 900RPM drill motor. It was producing 4.7 AC volts at that speed. An actual tachometer will give a more precise reading (and can do one better by factoring in system losses since it’s measuring the motor RPM while driven). Most likely, it’s higher than this, but not by much.
Anyone have a tach I can borrow?
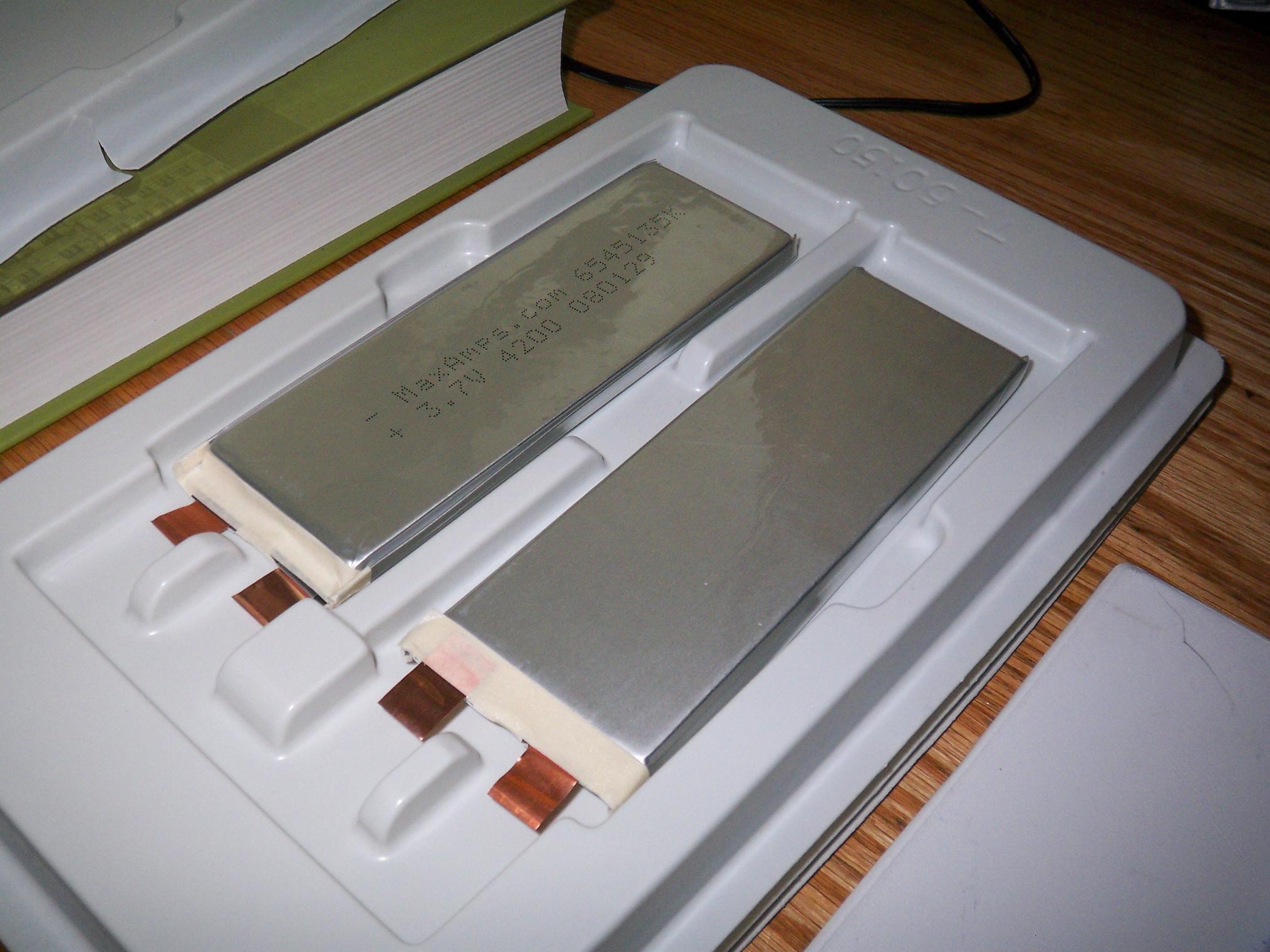
It’s time to address the electrical system. Here’s some 4,000mAh LiPo flat cells from Maxamps, courtesy of the folks at the Media Lab. According to Maxamps, they’re good for at least 80 amps continuously. If I ever draw that much current continuously, I’m making a large smoke cloud with it. I currently (PUN!) have 6 cells for 22.2 volts.
Curiously, Maxamps doesn’t quite explain how 80 amps could be drawn through a little aluminum flashing tab. Yes, one of the tabs is actually aluminum with a copper bit spot-welded to it. Whatever, if it has worked for everyone else…..
Trouble alert.
The 3 cell stack doesn’t fit by about .5 millimeters. I wish I were kidding. However, I knew this would be risky business.
Most LiPo cells of this capacity are around 5.5mm to 6.5mm thick, with the thicker being the higher discharge-rated ones. Maxamps advertised their cells as 6mm thick, which, in a 3-stack, left me less than 1 millimeter of play inside the scooter’s 19mm tall internal channel. The original battery mount was going to be “bottomless”, with the supports for the cells coming only from the sides and the bottom capped by a wide tape, such as fiberglass strapping tape or Kapton tape. My 3S pack with 6mm thick cells (which is not high discharge, unfortunately!) did fit in a test.
However, these cells are actually the 6.5mm type. I won’t blame Maxamps despite the fact that it’s printed right on the cell: “6545135” indicates a 6.5 x 45 x 135mm cell; beecause designing a battery mount to such tight specs is not very wise anyway, considering wires and heat shrink and tolerances have to be accounted for.
The result is that 3 * 6.5 = 19.5 which is more than what a snug fit would allow.
So naturally it’s time to deploy the backup plan.

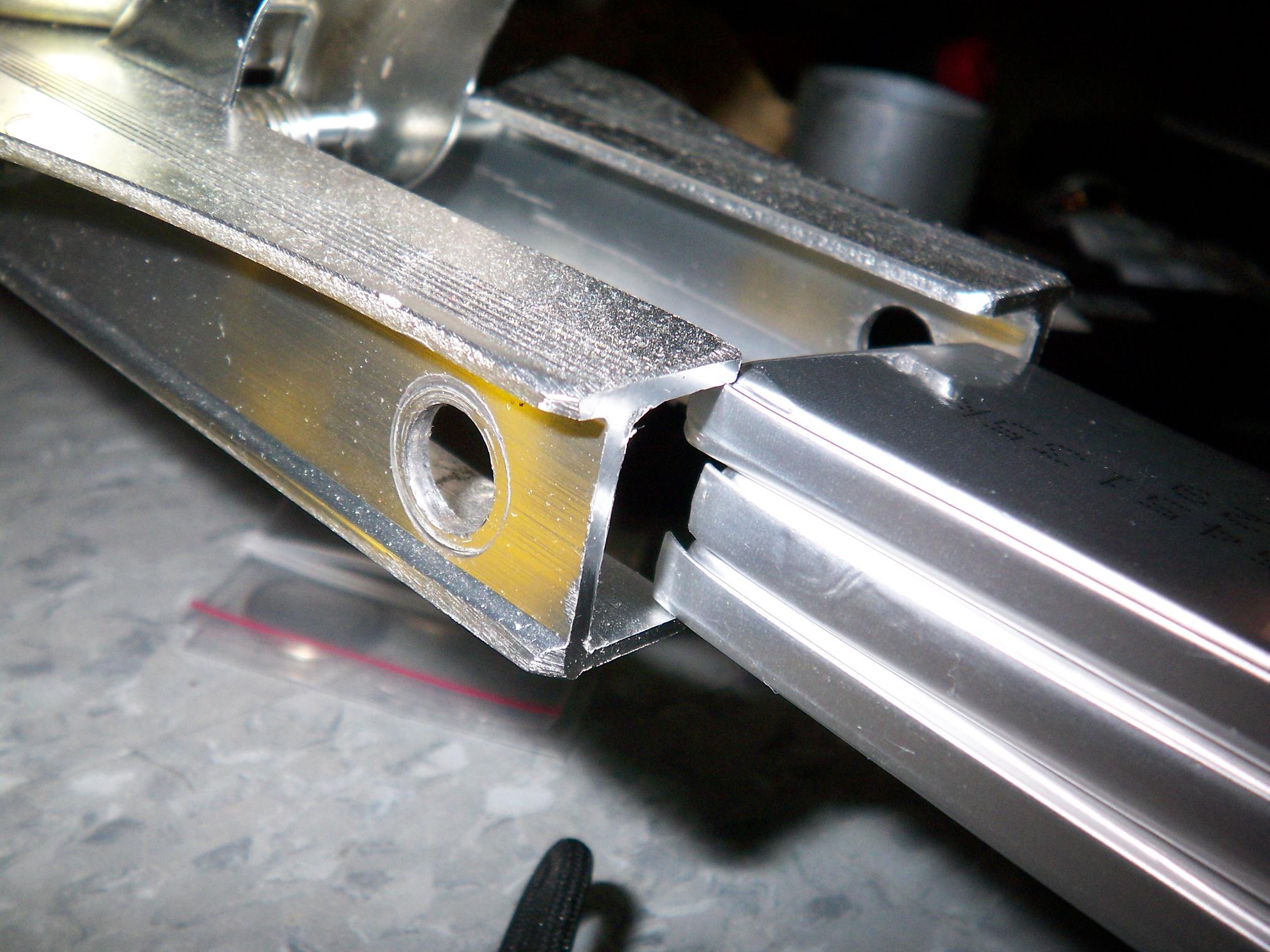
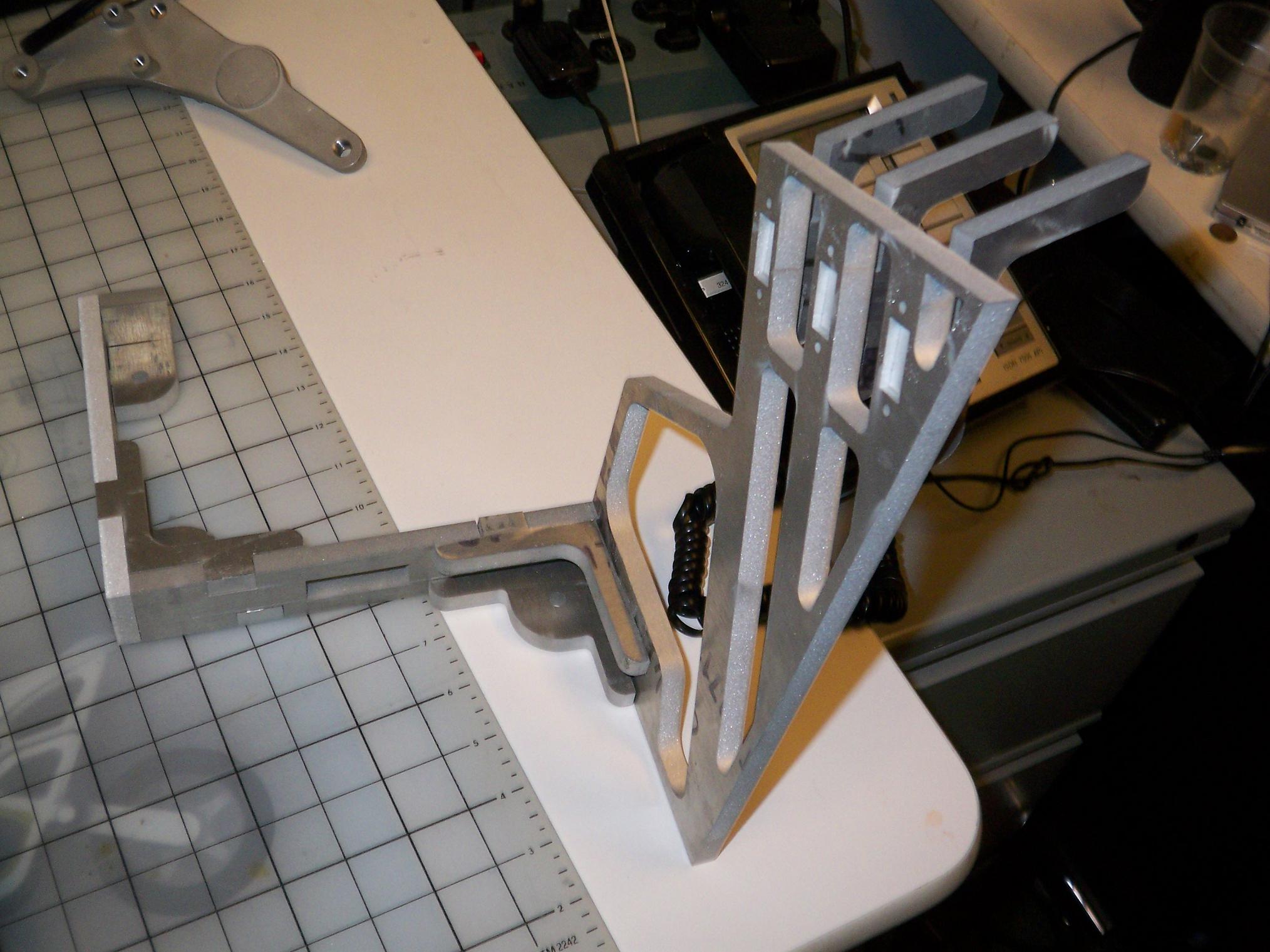
Here’s a sample section of a Razor scooter chassis. It’s a one-piece extrusion, which is great for mounting stuff to. The part above the flange (which is actually the underside, if you can’t tell from the scuffs) is 63mm side with a 57mm inner width.
Two of the cells stacked give ample clearance for a proper internal mount. Conveniently enough, a regular Razor scooter has enough material between the wheel mounts to hold 4 cells, 2 stacks of 2.

Here’s a rendering of the hypothetical underbody battery pack. The original plan was to use 6 cells mounted inside the body with an optional 6 added on in series on the underside to more run time. However, I have also considered just running one 8S pack split between the internal channel and the external mount.
So the plan is to take the long section of chassis, mill off the flanges and one long side, then make mounting ears that slip onto the underside of my frame and screw in place. I lose about 0.6″ of ground clearance by doing this, which is as low as I want to go anyway. Going this route with only 6 cells isn’t worth the effort, and so I will buy 2 more cells from Maxamps.
The charging port and balancer will probably be located in this secondary channel, since I’m free to machine it however I want.
But wait! Why do all this work to the chassis of another scooter when I could just use plain aluminum channel?!
…because they don’t make 63mm channel, sadly enough, at least not where I can get it readily. The only channel close in dimensions to what I need (that I have found so far) is far enough such that I can’t machine the walls down and maintain structural integrity.
Besides, there’s a junked scooter that’s exactly the size and shape I need.
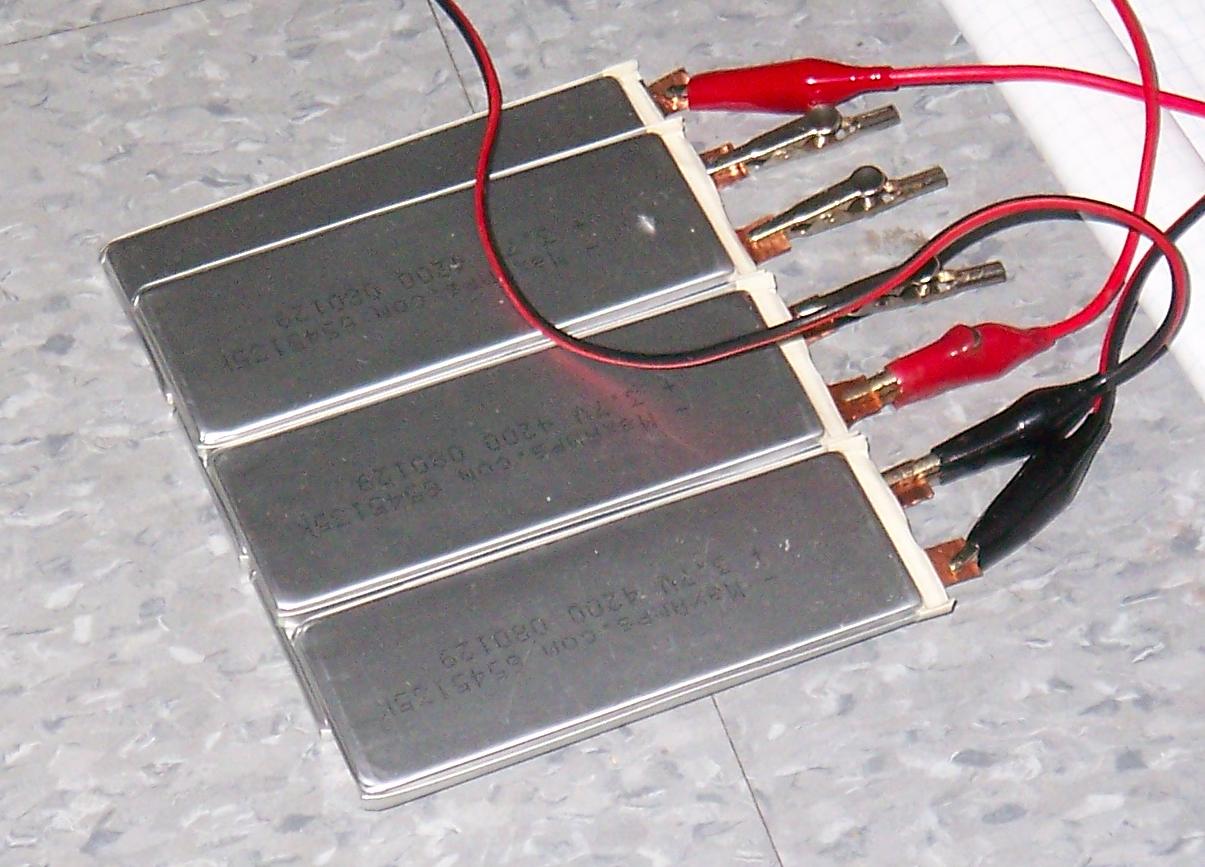
Hey kids, this is how NOT to wire up lithium batteries!
The first test run of the motor was on 36 volts, off Snuffles I’s pack. I tried a test using only 22.2 volts, and the motor was rather sluggish, and rightfully so. 8S will be advantageous in this situation anyway.
Now that things are actually wired up and moving, it’s time to make the mechanical mounts. I hope that I can get a test drive in before summer…
Bawt on?




{kind=link}