Welcome to another edition of Big Chuck’s Automotive Blog!
Well, I guess this time it’s Big Chuck’s Miniature Automotive Blog. I actually have not had a full engineering post on Chibi-Mikuvan, which has been in on and off development since late September. I’ve talked about it in bits and pieces, and did some parts investigation type posts:
- The original concept (near the bottom)
- Ford Fusion hybrid battery
- Hobbyking’s giant inrunner and angle grinder gearbox
- Trackstar 200A ESC (among others)
It’s also gotten some random cameos and teasers in other posts. I feel bad, though, when I do too much work and then don’t say anything about it. So here it is – the start to finish of Chibi-Mikuvan so far, ending last night. This warrants another “get a drink” warning.
We begin with the first picture seen in the introductory post. I found a drawing from carblueprints that showed the Mitsubishi L300, the equivalent in non-US and Japanese markets, into a 2D sketch and began tracing it.

I imported the picture at an indeterminate size, but kept shrinking it until the nominal dimensions matched up with Inventor grid lines.
The “ground point” of this design was wheel size. I was planning on using the dreaded Harbor Freight 8″ pink wheels, which are actually 8.5″ OD. This was scaled to fit the standard 205/75-14 tires of the L300 / Delica, at 26.1″ nominal OD.
Coincidentally, everything lengthwise ended up almost exactly something nice: 28 inch wheelbase, 53.5″ length overall. I picked a neat-looking number for the height at 23.5″.

Here’s the more finished sketch. I simplified the geometry some (how can you get simpler than this?!) like using pure circles for the wheel cutouts and arc segments for body lines. The US version which real-Mikuvan is one of has a longer snout – it’s actually even longer than the scale model shown here, but the proportions were off in this scale model such that when I modeled it at the full length, it was just hilariously bad looking. I settled for a “looks reasonably funny” number for the length.
Width was the problem. Japanese cars are pretty narrow – at scale, the overall width of this thing would have been only 22″. That’s narrower than Chibikart, and not only would I not fit inside the body shell, it would be very tippy. I decided to start with a 26″ wide shell. Because I made all the sketches at the origin’s midplanes, I symmetrically extruded outwards in both directions.

This is the solid reference model for the body shell. At this point, I still hadn’t settled onto a construction method yet. One way was to build an internal ‘skeleton’ of sorts, around the perimeter, and cut out the sides and panels in very thin material like polyethylene plastic. Another way was Epic Thermoform, and another still was a milled foam shell.
Isn’t it wonderful to be able to model 90% of your car’s bodywork in three solid features?

Coming from the Beyond Unboxing posts, I made critical-dimension models of all the parts I wanted to use. The shell seen here is a fake hollow version to make it easier to work inside the assembly. Shown is the angle grinder box, the Pink Wheel of Maleficence, the T20 inrunner motor, and a Ford Fusion dynamite stick.

The frame layout game begins. This time, it was a bit easier because I already knew what the wheelbase and track had to be. The diagonal line shown is an approximate Ackerman linkage reference line. I also knew how big the batteries had to be, so it was a matter of designing a big ladder around that.
I went shopping for stock go-kart sprockets right away. Basically, the seller which gave me the most technical data on something won – I spec’d out a 60 tooth #35 chain sprocket from mfgsupply (not to be confused with mfg.com, which can also supply you things if you so desire), along with a matching hub for a .75″ keyed shaft.

I’m too used to building long continuous one-layer frames with 80/20 rail. Not being able to make continous frame rails was kind of bugging me, even though I knew that I could just butt up steel frame tubing and weld. I briefly toyed with this idea of milling “Lincoln Logs” (muscle memory forces me to type Lincoln Labs) to allow me to make a continuous frame rail.
Shown in this image is one of the bearing blocks I plan to use – these come from Surplus Center.

The steering parts are now getting a bit more fleshed out. Because of the need to support the battery pack as well as to pass a solid rear axle in bearing blocks, I designed an “asymmetric Chibikart” kingpin and knuckle setup – where Chibikart captures the steering knuckle in between the pairs of ‘winglets’ on each side (these would be A-arms in a vehicle with suspension), this design keeps it entirely off to one side, entirely using the winglets as bearing blocks. In some ways, it’s like upside-down thug MacPherson struts.
The downside to this is that it needs to be built extra solid, but it keeps the design relatively simple. I won’t have to fashion some weird angled or offset member to accommodate the steering linkage.

Time to add a seat. I picked a leftover (from the summer silly go-kart camp) Razor Ground Force go-kart seat as my choice. For budgetary reasons, I couldn’t splurge on a real ‘human press-fit’ go-kart seat. I modeled this up with best visual approximations and a tape measure.

Here’s a size comparison with Chibikart. The driving posture will be nearly the same, but everything is just a little bigger. The seat is shifted forward in this picture – I wanted to get a sense of seating position, and there were several spots. This one was in fact too far forward and I wouldn’t really be able to get in and out.

If I said I didn’t want to make weird angled brackets, well, that clearly all went out the window the moment I had to reconcile the height of the body with the height of everything else. This was my first brute force stab at the problem, and it became the solution for a while. Because the frame is ‘underslung’ – axles, bearings, batteries all on top of it, I had to either bend something up or angle it to interface with the bodywork.

With the frame more settled, I turned back to making the steering linkage. The only way the steering could work for this design, because of the battery taking up the entire middle, was “linkage forward”. This is the reverse of traditional go-kart steering setups, for good reason: to get an approximation of the Ackerman geometry, it’s way easier to design with the linkages behind the lateral axis joining the two kingpins. Because otherwise, hokeyness has to happen:

Yes, those are crossed linkages: left wheel on the right side of the “Pitman arm” steering link, and vise versa. Everyone who’s tried a linkage-forward design in 2.00Gokart has gotten it wrong, chiefly because I had not forced them to simulate their linkges in CAD before making them (That’s changed this year, so none of y’all get to fuck up). If you keep the linkages left to left and right to right like in the linkage-behind design, you get reverse Ackerman geometry for most of your steering travel.
At the generally low speeds these things run at, it causes excessive wheel scrub and unpredictable changing between understeer and too-much-steer: Oversteer isn’t the right word here since it’s the outside wheel suddenly getting traction and whipping you into the turn, not the rear end flying out sideways.

Moving to the back, I cooked up this motor mounting solution which actually involves reusing the clamping ring from the disc guard of the 9″ angle grinder. The guard is made from some hefty, basically 12-13 gauge steel, and the clamp already fits on the nose of the gearbox, so why not use it? The plan is to cut it off and reweld it to a bent bracket to adapt it to the frame.

To stuff the inrunner into the gearbox, I plan on machining a custom shaft that is 12mm in diameter, steps down to 10mm (with a keyway to be cut into both pinion gear and shaft), and has an 8mm hole with a split-clamp on the other end to fit on the motor shaft. It will be tightened down with an extra heavy shaft collar acting on the clamping region.
Short of machining my own tapered locking bushing into this area, I decided this was about the most secure way to interface to the motor’s otherwise nearly smooth shaft. It has a D-flat in it, but hell if you’re getting me to trust a set screw mount at nearly 30,000 RPMs.

I spent some time putting some thought into how I’m going to mount the batteries. I was going to arrange them in ways the manufacturer never intended. I did plan on reusing the tabs they came with – why not do so? The cell module shells snap into each other, so it was going to be easy keeping them in place. I’d just need to figure out the cell orientation and make a thing to mold around them.
I went through a few iterations of cell layout before settling on this one. Basically, the cell ‘sticks’ can be turned around inside the shells, so I could make several modules that had the same polarity (there were two different mirror-symmetric shell designs) and then bus them all together in parallel. Then, those meta-modules would be bussed together in series. That’s how this big bracket was developed.
It carries 15 modules, each with two cell sticks in them. Five cell sticks in the same row get paralleled together, then those series-feed into the next five cell sticks, and so on. At the end, the connection switches rows (which I ‘ll need to design a custom bus-plate for) and winds back on itself. It’s basically a more epic 6-cell “3×2 brick” battery of the olden Nicad days.
These 15 modules will end up providing 28.8v at 40Ah, or a cool 1.1kkWh, the biggest battery I’ve put on anything so far that could still perform to nameplate ratings, conceivably. LOLrioKart used to run 48v 25Ah nominal Nicads, but the cells were so trashed there was no hope of them ever being 25Ah.

Getting close to something that looks like a silly go-kart. I salvaged a road bike handlebar and quill, which has been crudely modeled here, but might not keep it – it’s positively enormous in real life. I might trim it to a more useful length.

Here’s how the frame looks inside the bodywork. This was the frame design as it stood for about 2 months. I didn’t like it even before finishing it. It was too squiggly – too many angled cuts and welds to get right, and a lot of extraneous material. The battery pack was going to weigh 60 pounds and the frame another 60 – plus a conservative estimate of 10 pounds of bodywork, and I was looking at a 130+lb empty vehicle. Yeowch – optimizing in the wrong direction is coming back from grocery shopping for a whole fuckton of humble pie.
Steel. It’s a terrible thing.

Some time last month, while the 2.00gokart students were still in the early design stages, I sat down and completely refactored the frame into something which made a little more sense. This time, the frame is inverted relative to the axle and battery pack. The battery is now the lowest point on the vehicle, and it most likely will still not clear the damned Maker Faire cable raceways.
Inverting the layout in the vertical direction relieved the complexity of mating to the bodywork greatly, allowing the frame to be made totally straight and therefore easy.
I re-imported many of the parts from the first design to use in the second. Things which remained intact include the steering parts and all the rear axle components, as well as the seat mounting tube.

Around this time, I also firmly decided to make the bodywork from a foam-fiberglass composite sandwich. I’m basically going to turn into the Burt Rutan of silly go-karts for this. After all, I didn’t buy a copy of this for nothing. I decided that a thin sheet-over-skeleton body was going to be too fragile.
To this end, I used the solid model as a reference and made ‘thickened’ sidewalls which can all be machined from a single slab of foam on the Shopbot. The intention is to do this, then bond the foam together, then apply 2 layers of fiberglass cloth – enough to give it structure, then polish it off like the real thing. It would be painted plain white and then the artwork will come after that.
If someone can find me a thermoformer large enough, Epic Thermoform is still on the table.
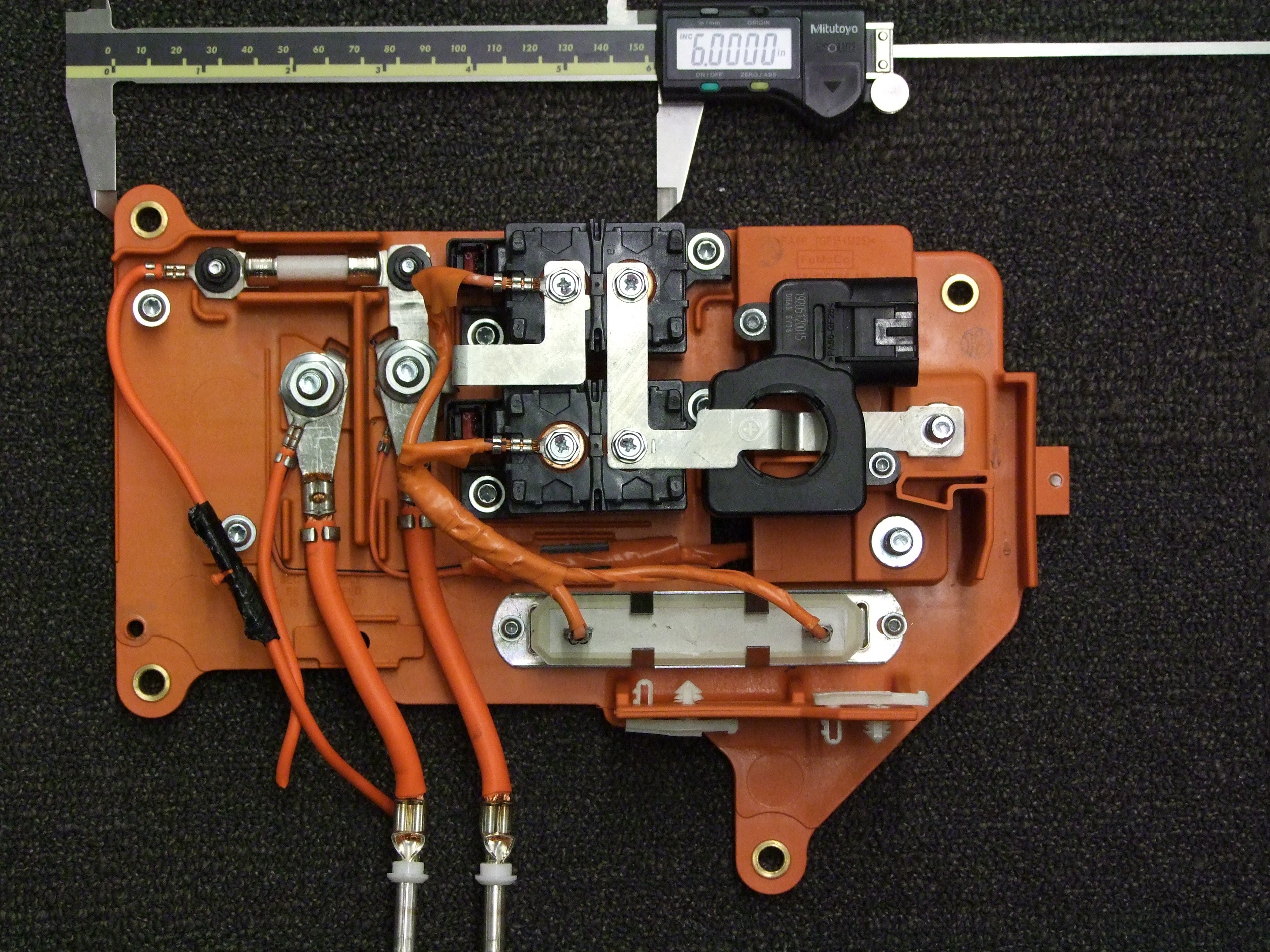
With the mechanical parts largely being copy-paste, I moved onto modeling moer electrical system parts. This is the contactor deck from the original Ford battery – it’s missing one contactor that controlled the battery negative, which I took out because in my system I’ll only be switching positive. I’m going to try and use it otherwise stock, just to get more usage from the pack. All hybrid batteries will come with a contactor pack like this or similar, so it can be a valuable resource in its own right.

To make the shape, I again imported a picture of it and began scaling until the size made sense. The 6″ caliper acted as the scale item in this case – between its arms is 6″ +/- about 0.01.

I’ve added more detail to the frame now, including the new front and rear bodywork mounting points, which double as bumpers. The extra front biased volume is going to give me much more legroom. The little holes in the bumpers are so I can attach the bodywork with quick-release pins.

The frame next to the bodywork model. The folded sheet metal brackets will be bonded to the body and travel with it – they’re only shown in place here for visibility purposes.
I mulled over this design for a few days to make sure I still liked it. It was time to start cutting steel.

I got a great deal on eBay for mild steel tubing – nine 4 footer sticks of 1″, .065 wall for only $35 total (shipping that much steel was a whole ‘nother tax break expiration). That’s not far above scrap pricing. Someone’s obviously trying to get rid of a lot of this stuff, and it might have been actually surplus or scrap – it was the dirtiest, most greasy steel I’ve ever had the joy to touch. An entire can of brake cleaner went into cleaning just the five rails I cut up.
Here is one, mounted on the coldsaw, about to be sectioned into frame pieces.

The resultant frame cuts! Not only did I process all the square tube, but the round stuff and hub parts too.
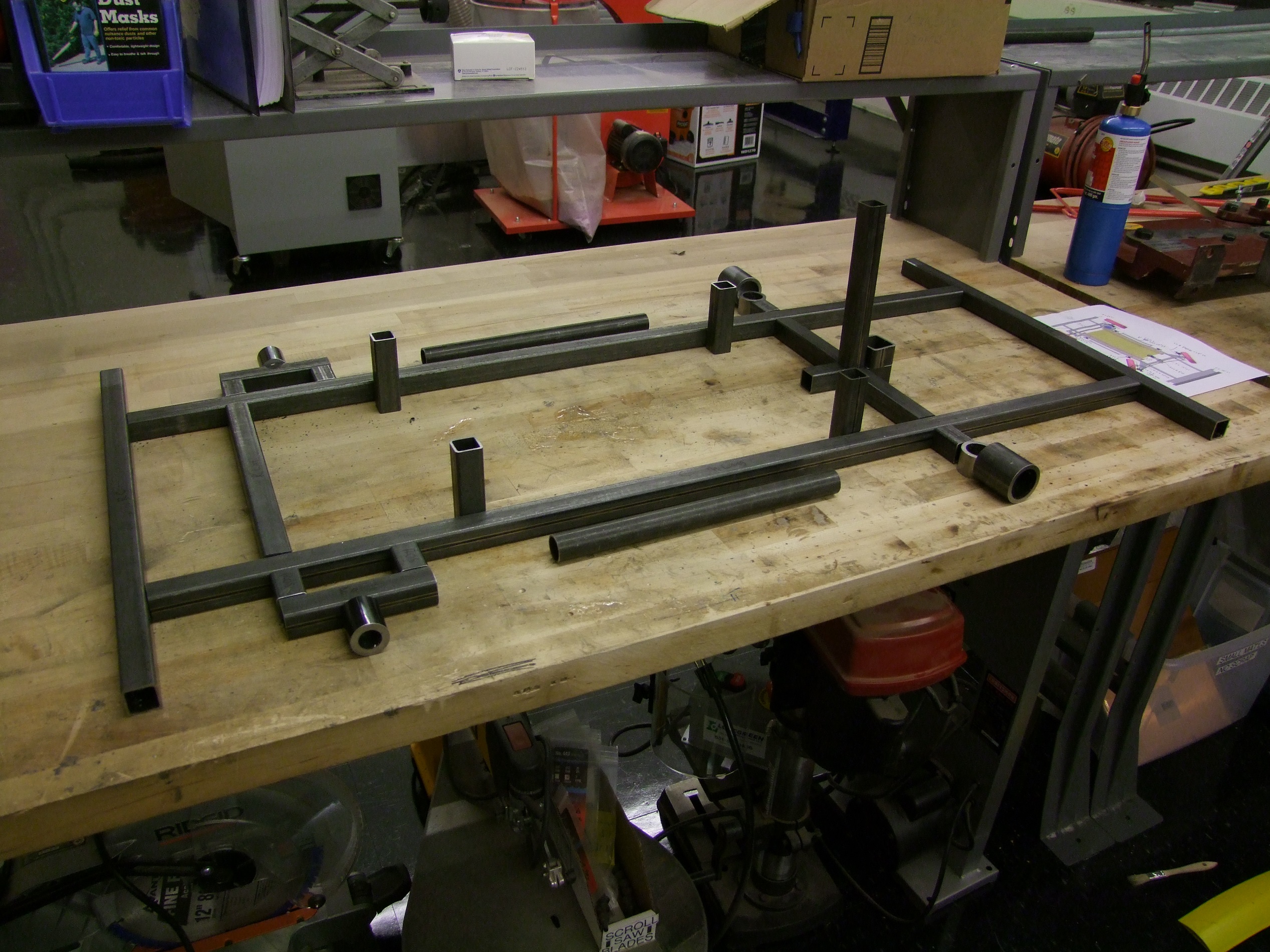
Here’s a dummy frame mocked up. The whole thing is 47″ from front to back – the bodywork brings it closer to 5 feet.

I had the joining plates waterjet-cut from 1/8″ steel. These include seat mounting flanges and reinforcement plates for the front steering knuckle area, as well as the flat plate profile for the motor mount. Overall, this vehicle features very little waterjetting, and it could all be bypassed if I were working to stricter budgeting requirements, but that would be taking Powerwheels racing too seriously.

The small tube chunks are all parts of my BurnoutChibi-derived hub solutions. In fact, BurnoutChibi was a prototype for this design, especially the fronts.
I decided to fabricate instead of buy drive hubs because 1. nobody made drive hubs for shitty Harbor Freight Pink Wheels, and 2. commercial cheap go-kart hubs are just slabs of steel welded to tube anyway. The bore of the tube is almost exactly .75″ – it even fits over the driveshaft I bought. It will straight up be broached for a 3/16″ standard keyway.
My first instinct is to all-aluminum-billet this, like old LOLrioKart hubs, but it’s being kept cheap and steel to more closely follow the spirit of the event.
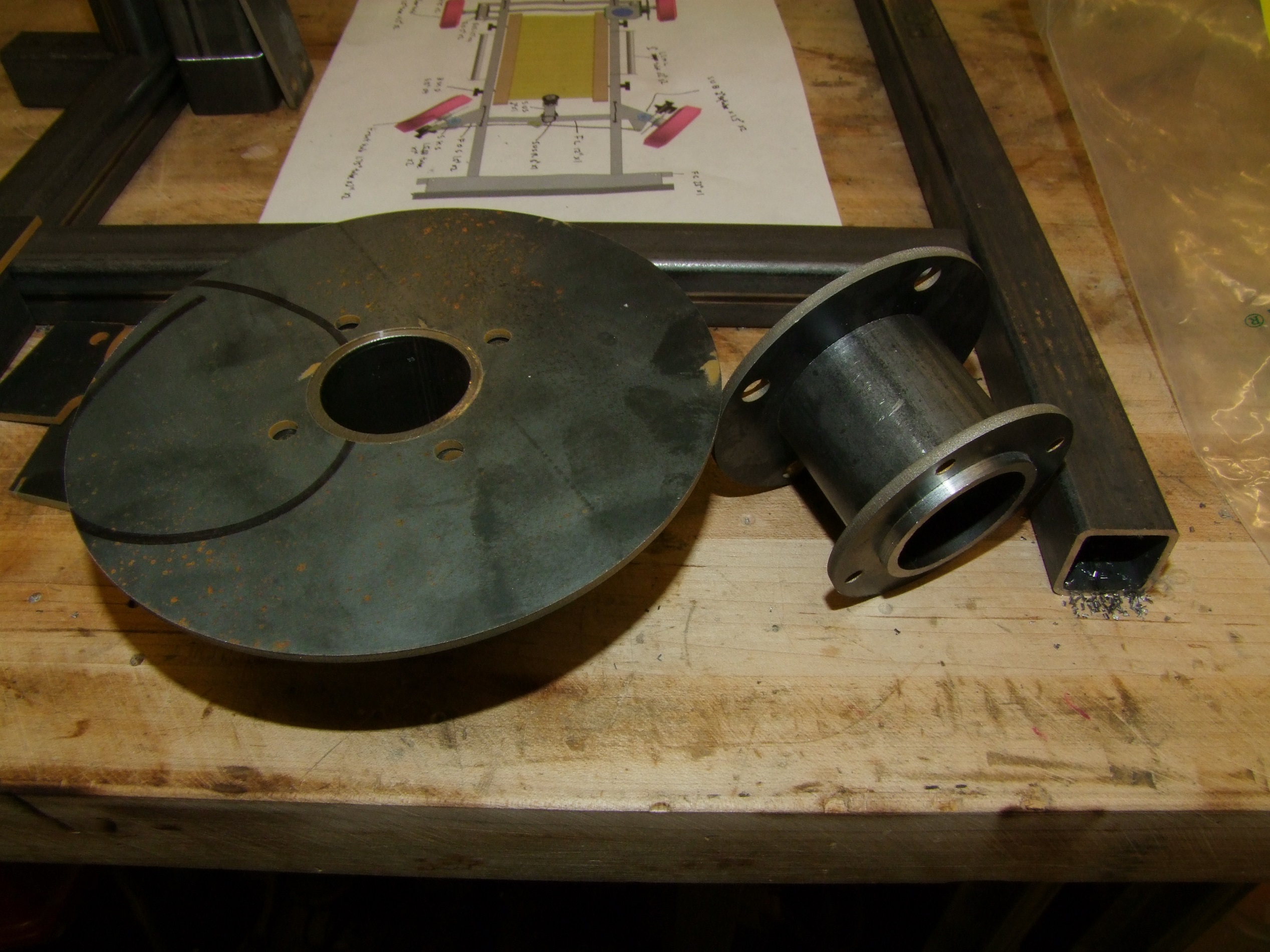
The front hubs are an exact dimension change of BurnoutChibi hubs. I bought the steel tube such that its inner diameter was almost exactly 1 3/8″, necessitating minimal reboring work to stuff bearings into.
And check out these custom, almost 7″ disc brakes! Is this serious braking overkill or what? I think my actual van brakes are not much bigger.
I can make up for everyone elses’ shitty dysfunctional scooter brakes at the race.

To utilize these hubs, I had to carve off the existing bearing hubs from the Harbor Freight wheels. I chucked this into hugelathe and ran a standard boring bar into it, boring away at the face of the wheel until it flew off.

Using hugelathe, I also finish machined the hubs after welding them together. BurnoutChibi’s hubs did wobble a small amount due to welding warpage. These hub plates were all bigger, so the warp was amplified. Post-machining was also needed to make the boss that the rim halves sit on, and to clean up the interior of the tubing for bearings.
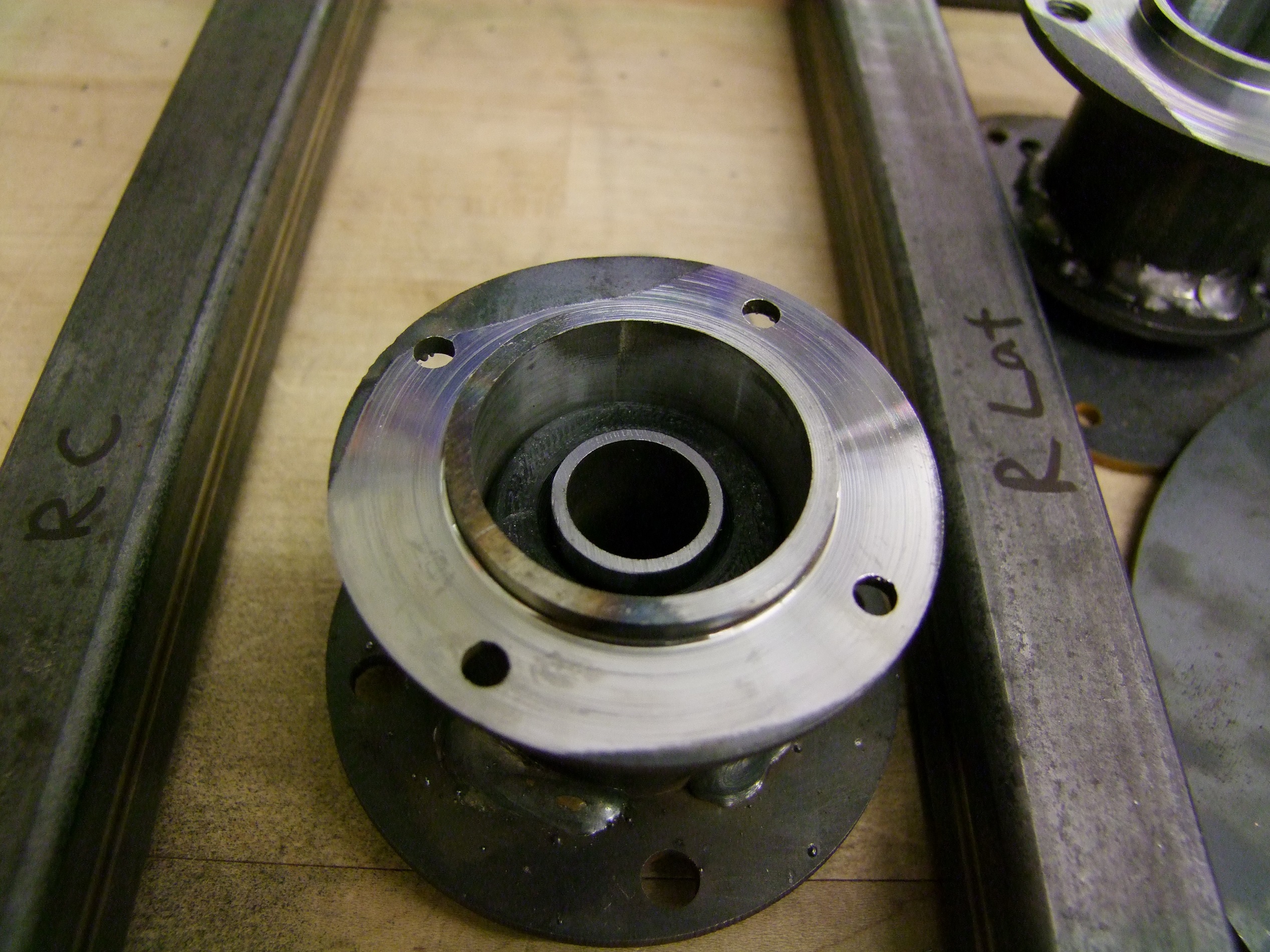
The internal bearing spacer dropped into place. I whipped up a “spacing donut” for the Makerbot to chew on while I did the welding and machining. This spacing donut is 95% air and only serves to keep that spacer aligned roughly with the bearing bore so I don’t have to play “chase the spacer” every time I have to pull a wheel.

Here’s a finished set of front wheels. I’m waiting for an order containing broaches to finish the rear drive hubs.
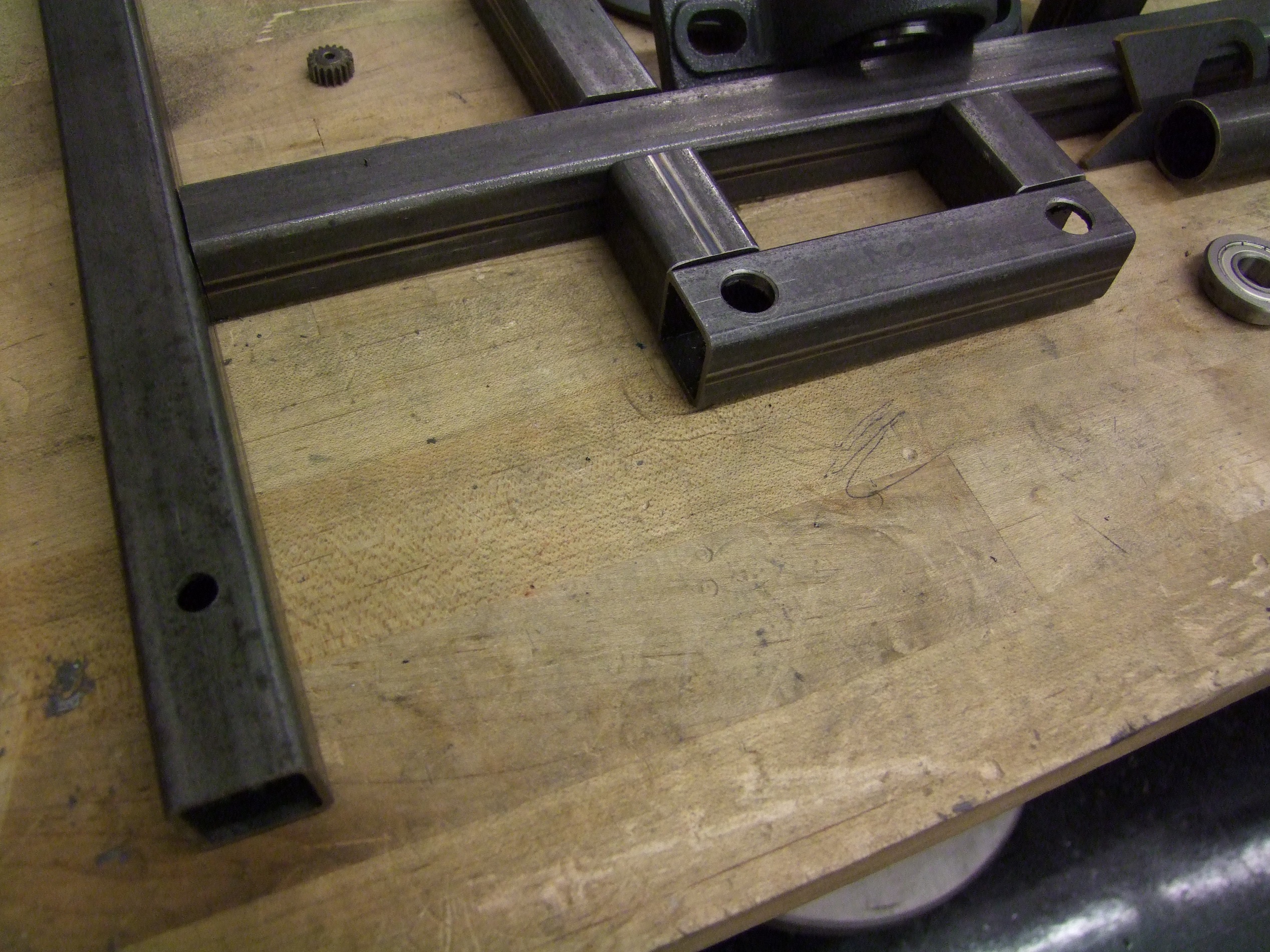
Meanwhile, I’ve been drilling the necessary holes into the frame tubing. I hope to be able to weld most of it together this weekend, as well as test-make a body panel on the Shopbot.
It warms my heart that you’re using an L300 as the inspiration for this — I have one. In Canada it’s legal to import them, right hand drive and all, and there are lots zipping around Vancouver like hopped-up toasters.
this thing needs to have a matching trailer too, for more batteries and hauling stuff (and people) around shows and expos.
Uhh not trying to pop your bubble, but there is a 1440 watt limit for PPPRS.
Just sayin. Unless you are exploiting the “I Ain’t Even Mad” clause. and the Charles Guan clause lol.
I actually worked with them on this limit. The majority of this power system got planned beforehand, but I’ll just drive gingerly.