Due to finals week, I haven’t made much physical progress on either design since the last update. I did receive parts that I had ordered over the week and the previous week, however, and messed around with some of those. Past that, I’m in the process of filling out the internals for Ãœberclocker. Electronics are stupidly expensive, and who knows, I might get crazy and delusional enough to make my own controllers.
Also, the MITERS lathe has been under a rewiring job for the past few days. Nobody really notices it because it’s hiding behind the machine, but the 220v 3-phase outlet has been hanging by a loop of duct tape stuck around the conduit box channel, with exposed conductors and everything. Occasionally, a metal curl will fall between two live conductors and there would be a bright spark as it vaporizes. If you swept under the machine and jiggled the wires wrong, it would lose contact and the lathe wouldn’t run.
Not only was that a pain in the ass, but it was one hell of a fire hazard (along with everything else at MITERS). MIT Facilities has been working on rewiring that entire conduit as well as “updating” the ancient wiring of the lathe itself. It’ll probably be a little while.
In the last Pop Quiz episode, I discover that hard drive motors are all the same, and worse, all slightly short. So I took the opportunity to redesign the motor, not around the small stator, but…

…around two stacked stators. I also took the opportunity to simplify the motor design significantly, reducing the amount of weird internal boring I have to do with the not boring bar.
Last time, I couldn’t find a steel pipe or tube with the proper dimensions to make the magnet ring. After my last final exam finished, I headed directly to Central Machine Shop (what priorities…) and got some 1″ ID x 1.5″ OD pipe, which should cover many small motors to come.

I also got some more prospective parts in the mail.

The chassis will be made from the slabs of UHMW, which are 1/2″ x 6″ square. I will actually mill them down to 3/8: while making the internal features. At this point I’m not too sure on how to clamp a thin bit of plastic in a milling vise, especially since I’ll be cutting the center out of it. I might screw it to an aluminum or MDF fixture plate.
The rubber cord is 1/2″ diameter neoprene rubber. Little chunks of it will form the bot’s wheels. This is another machining quandary, since I’ll need to drill a hole down the middle as well as slice 5/16″ wide chunks off.
Hmm, I wonder if I can stick a razor blade on the toolpost?
In Ãœberclocker news, I received a prospective drive motor candidate.

I designed the bot around a 900RPM drill gearbox, which is quite uncommon compared to the 36:1 gearbox that dominates the ‘cheap drill’ market. There was Harbor Freight, but for $40 a drive motor I might as well DIY a gearbox anyway. A tour through Google Products led me to a bunch of obscure, sketchy-looking online vendors which sold drills as part of their inventory. I found a (suspiciously similar-looking) drill package for $25.

After executing the Standard Cheap Drill Dissection Protocol, here are the usual suspects. A 500-sized motor, a gearbox, ball-detent clutch, and a variable speed controller. The battery pack reveals 15 1,300mAh sub-C NiCd cells, also standard-issue. Nothing too unusual.

However, this is a legit 24:1 gearbox with a 4:1 (instead of 6:1) first stage, and a legit 18v motor on the end of it. I had heard a few stories of some of these drills actually being factory-overvolted 600RPM units. I wouldn’t put it past Chinese manufacuring to do that. Fortunately, this one’s for real. Here’s the link if anyone else is seeking a faster drill motor for drive.
Slightly overvolted to 24 volts should give ÃœC a speed in the 10MPH range.
The same day, I got some luck at MITERS while sorting through the increasingly large bin of random motors to categorize them (“big”, “small”, “stepper”, “not motors but round and shiny”)

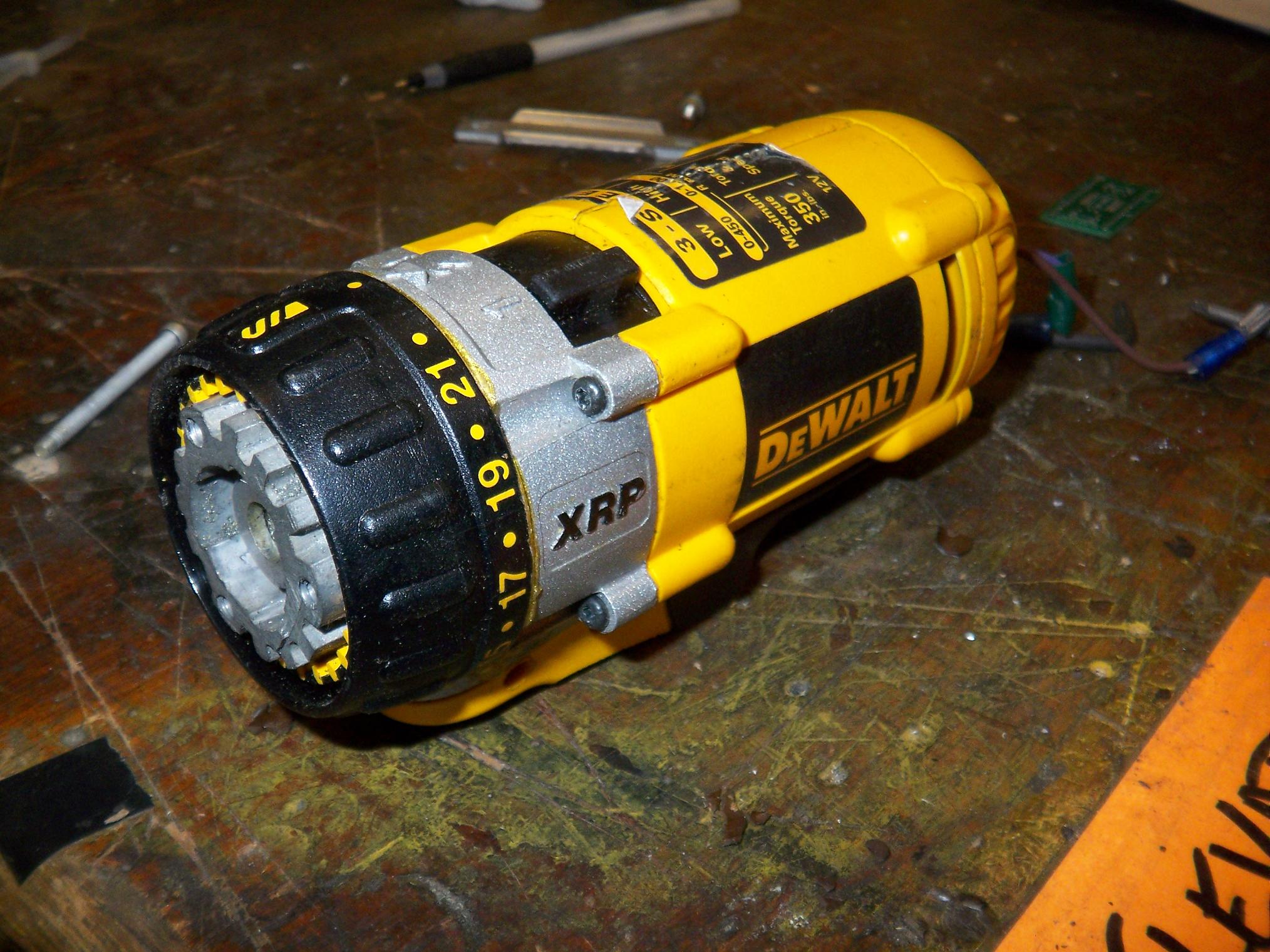
2 half-processed 12 volt DeWalt drills. Someone had cut the handle off and removed the chuck and clutch assembly to convert it to a drive motor, but looks like they stopped midway. Saves me the effort of having to gut it myself. They are the newer, less-explored 3-speed type.

I duct taped the gearbox parts together so they don’t crumble. I accidentally let the internals slip out once, and it took 20 minutes to figure out how to reassemble it.
These gearboxes appear to have no mounting provisions whatsoever. The best way to mount them might just be to cast them in epoxy or urethane, something formable which I can make a normal-dimensioned mold for, if I end up using them. They would be great for the drive, as the arm solution is taken care of. On the high speed range, the bot should go over 9000 MPH.
They are 2″ in diameter, which makes the mounting game slightly more problematic as the bot is 2″ tall at the frame.
I put these back in the pile, since it’s unlikely someone will randomly come and steal them both.
Stay tuned for more! The summer build season is on, and I should be getting a pile of materials for ÃœC after the Memorial Day weekend.