Motor control companies are scared people will use this “weird” device to slash their motor controller costs! See shocking video before they shut it down!
Anything that happens in MIT and beyond.
Motor control companies are scared people will use this “weird” device to slash their motor controller costs! See shocking video before they shut it down!
A year ago, I embarked on a project, nicknamed at the time “Project Seedling“, to create a class at MIT dedicated to silly electric vehicle design. The backstory of it was basically as follows: Since 2010, I had aided the MIT EVT in running a small section of the 2.007 class in which 4-5 students built a small EV, in years past having been scooter or bike-like contraptions. In 2012, the EVT members who had run that section had other obligations, and so could not take on the responsibility.
By that time, I was sufficiently interested in how small EV building had seemingly infected a sizeable portion of MITERS and even people beyond, and decided to take on that role as organizer and also (lecturer & shop guy & design advisor) in order to make the problems even worse. In doing so, I pushed for expansion of the section to 10 students, almost a full 2.007 lab section, but ended up taking 11. The class was scooter-centric with a focus on practical usage, but I allowed the students significant design leeway, so creations as varied as melonkart and… these things.
Taking what I learned from that year, I decided to do it again this year, with a twist. While giving students complete design freedom was beneficial to the few who took advantage of it, it was also frustrating to those who didn’t quite “know” the subject matter already (as quite a few of the students had seen our work prior to the class or had built their own projects already) as well as an astronomical amount of variety for me to keep track of.
Using Melonkart’s two-person effort as a starting foundation, I drafted right then and there at the bottom of the post what the project I codenamed “2.00gokart” would entail for 2013. I spent much of the fall semester and January thinking about and balancing those requirements and desires with how many hours I would have to put into it playing lecturer (since 2.007 mainstream would of course not cover EV-specific topics like how motor controllers work internally), design advisor (because when there’s 8 different combinations of parts that will hit your goal, I have to teach the concept of pick-one-and-try or compromising aspects of your design to those who may have never done it before), and shop guy since I de-facto am still the lab manager for the International Design Center tinylathe’s lair.
Over the course of late fall semester and January, I initiated a build trial for a “2.00gokart Prototype” of sorts, handing the job off to Banks. The end product was SmartKart:

You see where the priorities lie…
So called because it was awkwardly tall and short wheelbased, like a Smart car. Through the build, a few pitfalls of my original assumptions were revealed, such as the fact that no, even with the amount of free stuff included, a $300 per-team budget was going to be impractical. It COULD happen, but you’ll basically be running 150W scooter motors with relays and using Pink Harbor Freight Wheels. In the end, most of the ideas stayed the same. Some were removed, and other requirements added. Basically the final version of the rules goes something like:
The challenges will remain a 50 meter drag race followed by that thing we keep doing in the videos of everything, driving all the way up one our our campus parking structures. I look forward to this year’s challenge because you can take turns so much harder with a kart style vehicle than a scooter or anything else. Furthermore, all karts will basically hit something at the same level, so instead of putting up catch fencing, I’m just going to pile bricks of fluffy insulation around columns, doorways, etc. to appease the Gods of Health & Safety. Last year, I piled a few bricks of that stuff around specific problem areas in the garage. While none of it actually ended up being used in the intended sense (which is good, mind you), I think a row of them will certainly beat having to roll up an eighth mile of little orange fences at the end. This enthusiasm might be damped once I calculate how many semis it will take to equip the walls properly.
So what’s currently happening on the front lines?

The first event of the semester was what I’ll basically call “hoonage night”, in which interested students could come take SmartKart and other vehicles, including DPRC for a joyride or two, to get an idea of what they might be building. My section had to change to applications-only this year, because in the span between last year and now, something like half the Mechanical Engineering class of 2015 had heard about it. I ended up having an acceptance ratio of something like 40% of the people who applied.

I also put out a “petting zoo” of parts left over from last year as well as samples purchased this year. Part of my agenda was to encourage more people to use DC motors for simplicity reasons, since wiring up a brushless motor with sensors is more electrical legwork. Last year, you were also hard pressed to fit a good controller into the budget along with a brushless motor, so some of the vehicles were somewhat over-motored for the amount of amps they could actually use. In the “petting zoo” was wheels, motors, brake parts, etc. so people could start modeling parts up right away if they saw something they liked.
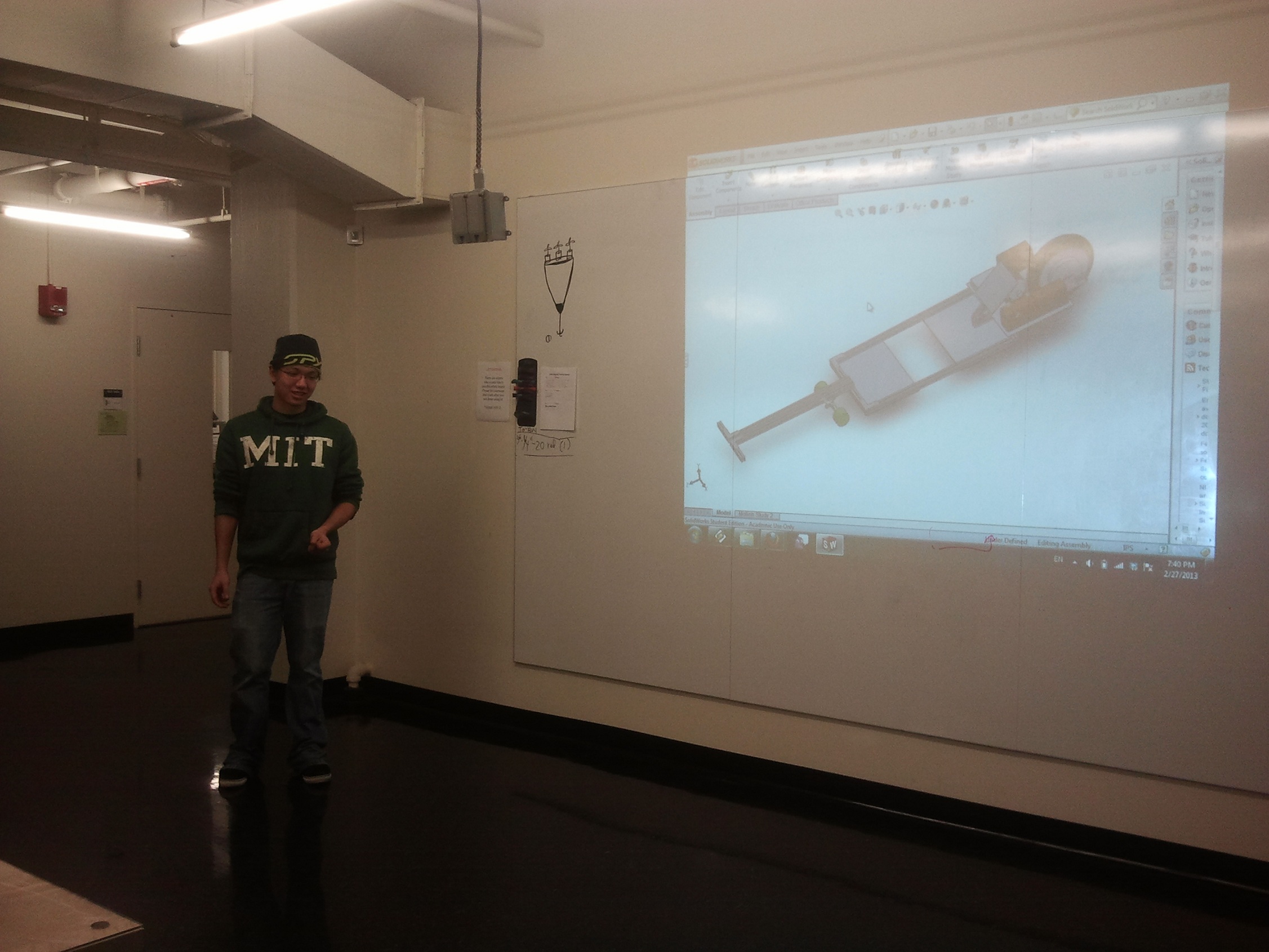
Around week 3, students had to give a brief talk about their design and what parts they were planning on using. The design shown above will prove to be quite exciting…
Before this time, I used about an hour of each lab section per week meet to lecture about EV-specific subjects such as drivetrain/motor calculations, electrical systems, and mechanical parts and joinery methods.
Now we’re getting into Week 4, and things are picking up. First orders have been sent out for parts, and designs are reaching the point of being finalized.

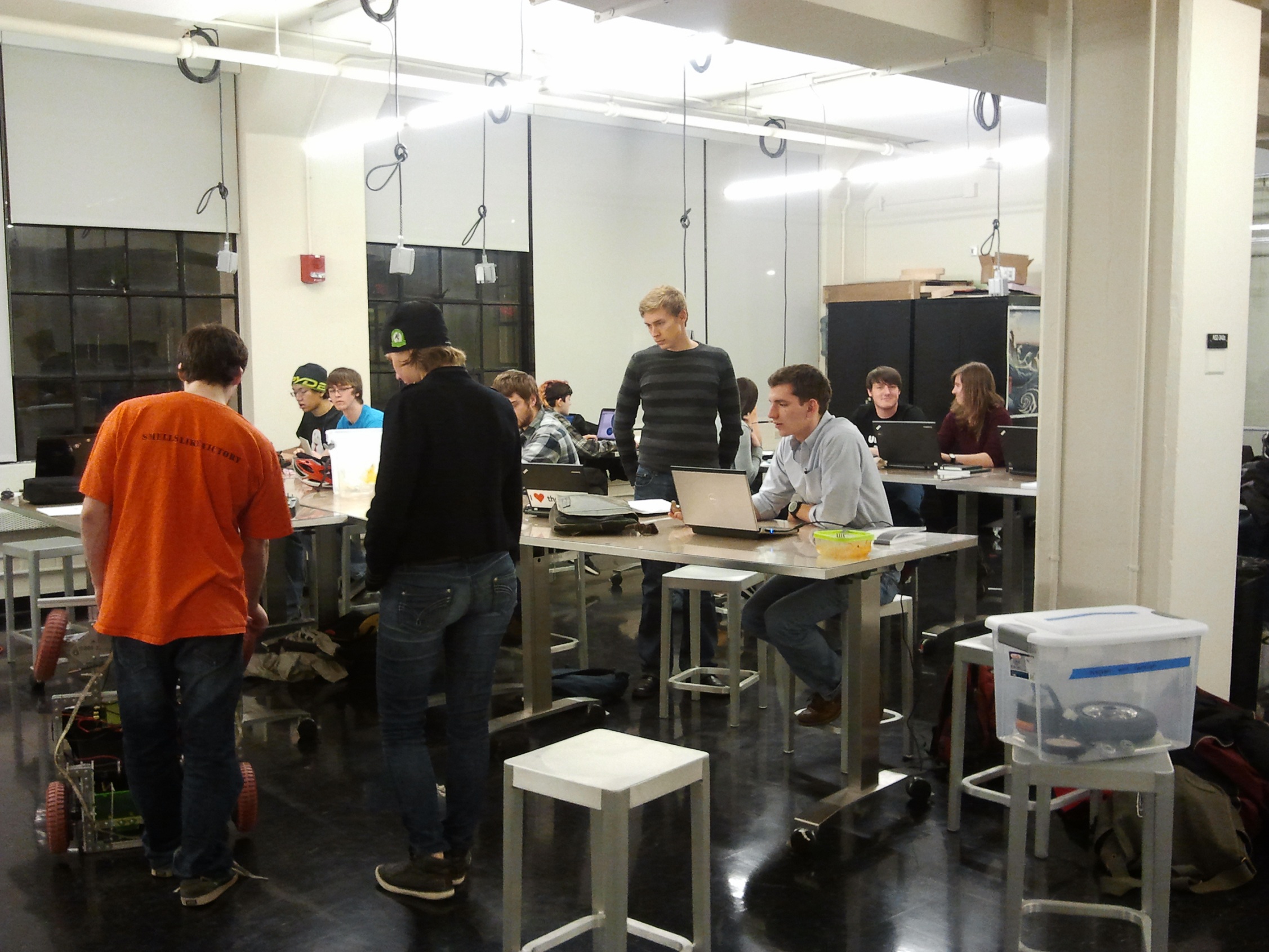
With the fabrication period really picking up now, I rearranged the room such that each team is going to get 1.0 tables of space to work on everything, and keep their parts. These tables are on wheels and can be rolled into the shop spaces for easy access to tools.
The short term future promises to be very exciting as the teams are facing the infamous “Milestone 7” rolling frame inspection in only about 3.5 weeks time! How many shall remain afterwards?