It sure feels good to be back doing one of these again! It’s been a while since the last one, about little hub motors that you can now buy instead of e-mail me about; since then, they started making EVEN SMALLER ONES! Now we’re talking 8wd Chibikart Pike’s Peak Hillclimb Edition levels, or the go-kart equivalent of the Human Centipede or whatever. Your tastes might vary.
On this edition of Beyond Unboxing, we explore a product that is so quintessentially me for some reason that everyone has felt the need to go “Hey! Have you seen this thing? It’s so totally you!“. I’m of course talking about…

Little known story: The whole reason my ears existed on Battlebots, and subsequently I became known as “cat ear guy”, was because I made them as a knockoff of Jamison’s ears which were a directly inspired knockoff of the Axent Wear. See, unlike Jamison, I never finished mine, so they were merely hollow shells. Not only that, but I basically brought them as an afterthought – as a “okay, might as well look goofy if needed” accessory stuffed into the very top of my luggage.
In fact, his knockoffs were so convincing that many people also told him that “Dude, you got ripped off!” when they heard of the Axents. Ah, the circle of Internet fame.
This does seem a little out of the ordinary as something I would just go out and buy, since it’s not some kind of obscure motor controller or power tool… but there’s a story to that too. Apparently the producers of Battlebots were at CES 2016, saw them, and were reminded of me. It helped that (allegedly) the booth personnel were fans of the show. A week later, I had a unit in hand after it was given to them and shipped to me! Awesome. Brookstone, if you want your name on #season2, we need to talk. You guys need to put a liiiiiittle more effort into sponsorship than that, wink wink, but not much more!
So here we go… Oh boy.

Yup. #Season2 will. Be. Insane. Now, those who are genre-savvy with Beyond Unboxing posts will know that I pretty much only make these posts if I already have plans for something. In a way, they are a barometer for what I might skulk off to do next. I’ll explain how this ties into the #Season2 (I will pretty much only refer to #Season2 using a hashtag, by the way) plans soon.
At first, I didn’t really intend to take these apart. But then I was showing somebody, and I dropped them. And then, I only had one side’s lighting left over… uh oh!
Get ready for some Beyond Unboxing, where I take these apart gratuitously in order to see what might have gone wrong with the wiring when they were dropped, and alongside, give a quick tour of consumer product design.

Here is the beginning of the presentation. It comes packed in a plain black, non-showy form-fitting zipper case. This is an alien concept to me, since I guess I’ve never owned “nice” headphones in my life until recently when I picked up a HyperX Cloud gaming headset secondhand, and it also had a case.

Inside the case, the headphone cable and boom mike live on the left, while an included USB micro-B cable for charging is on the right.

The unit by itself. Once again, I don’t claim to know anything about nice headphones. I assume they all have this many degrees of freedom!
I’m not sure if I am a fan of the sound yet. It’s quite “boomy”, reminding me of the times I tried some Beats by Dre – all bass and low end, and nothing spectacular elsewhere. I suppose it fits well with current pop and hip-hop music. Either way, it’s well known that I am a Hipster of the Nth Degree when it comes to music, so I explicitly absolve myself of any authority on this matter.

A closeup of the lighting effects. The LEDs are clearly white – just the plastic colored ring determines the color of the glow. My issue was that the right-hand side (as pictured, so “left ear) was very sporadic, like a connector was barely hanging on or something.
For those who haven’t seen these used, the headphones are passively powered via the cord like you’d expect – but the lighting and external speakers (in the ears) are battery-powered, hence it needs periodic charging.
Let’s start popping stuff apart. First, the earpads can easily be slipped off (I keep wanting to call them “ear poofs”, but they have a name):

This exposes four small screws to open the housings.

Use a small Phillips driver (I had a #1 – this seems to be correct) to open the housings.

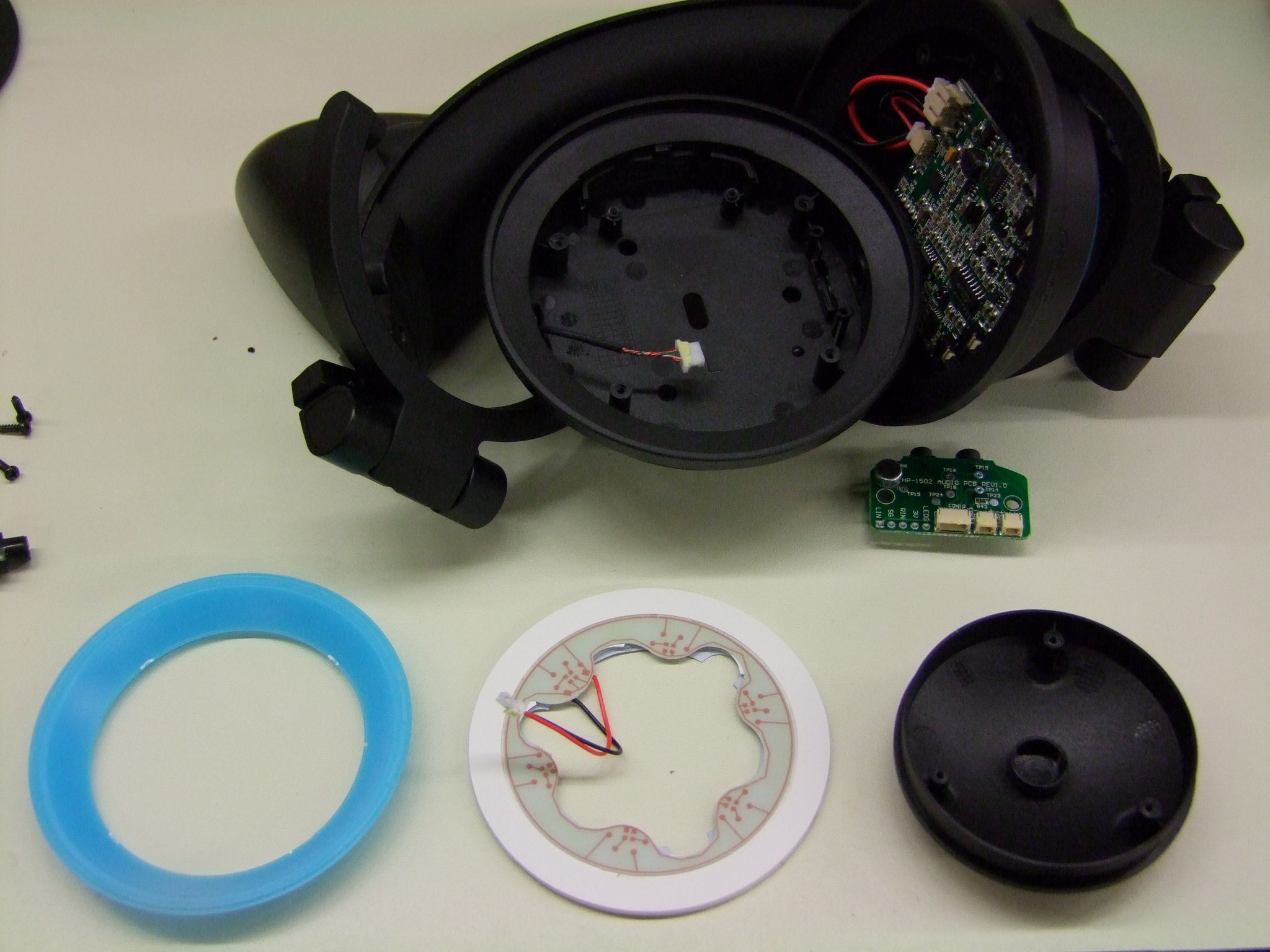
Here’s what they look like on the inside. The left side has the audio input and microphone jacks. The signals travel to the other side which contains the amplifier and power supply board.
The signal input board is held in by two small screws. I also pulled out the spring clips which give the housings a bit of “detent” feel in their yokes (the forks they’re mounted to) – that’s how they stay in place if you fold them. There’s a small plastic plug that the spring clip mates with that pulls out easily. From there, the housing can be full removed…

..If you’re more careful than me. I tried to remove the housing entirely, but I misaliged the other side and broke off the other pin-like structure its mounted to. No consequence, but there will be more sloppy movement as a result. Being more careful instead of pulling harder probably could have avoided this. Alas, the difference between a hub motor and little plastic speakers.

Regardless if the housing comes off the yoke or not, the plastic accent ring and cap can be removed from the inside using four screws. Two of these are accessible only if the input board is removed.

Check out the LED ring. I plugged the board back in temporarily to show the lighting effect.
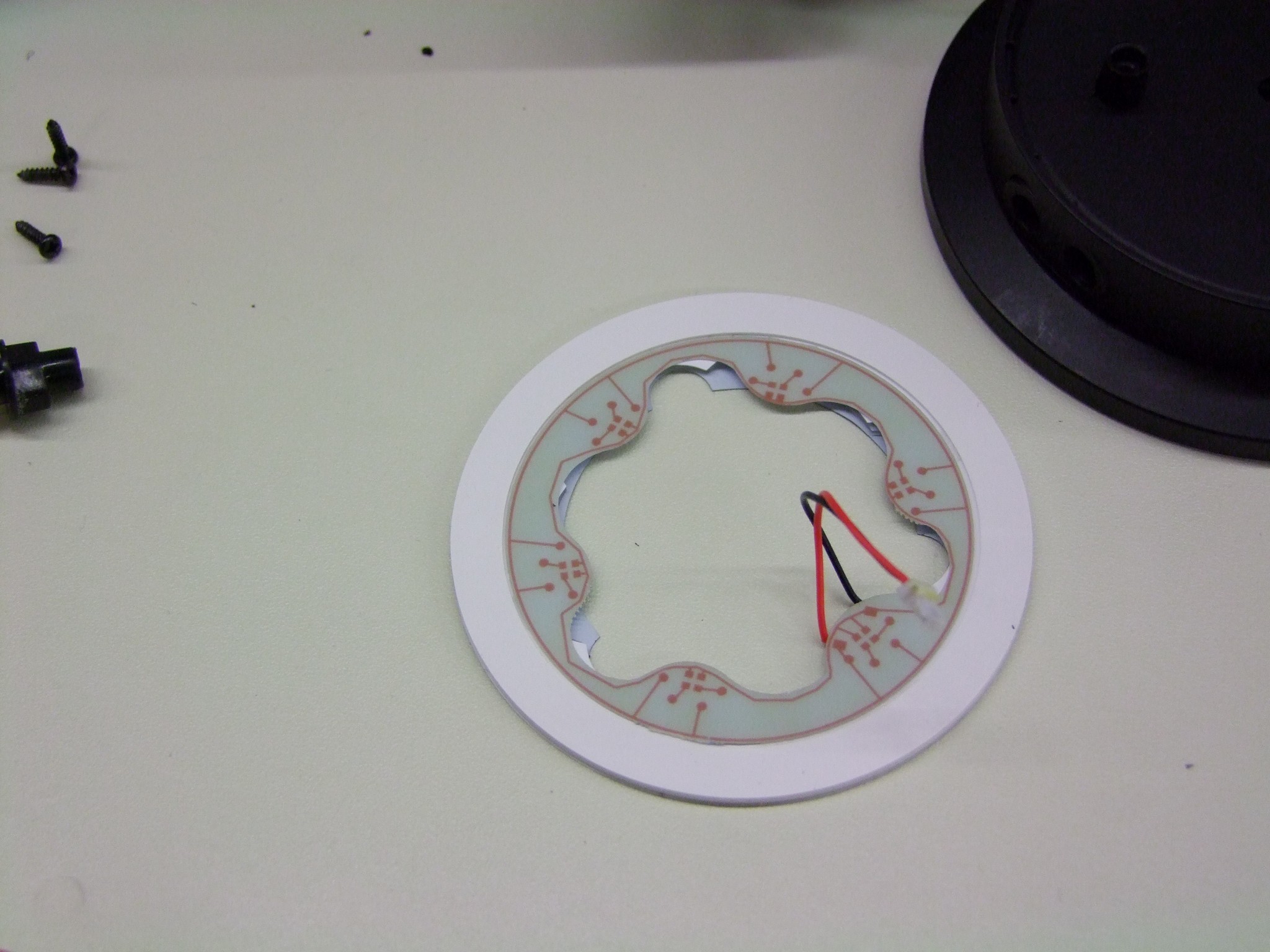
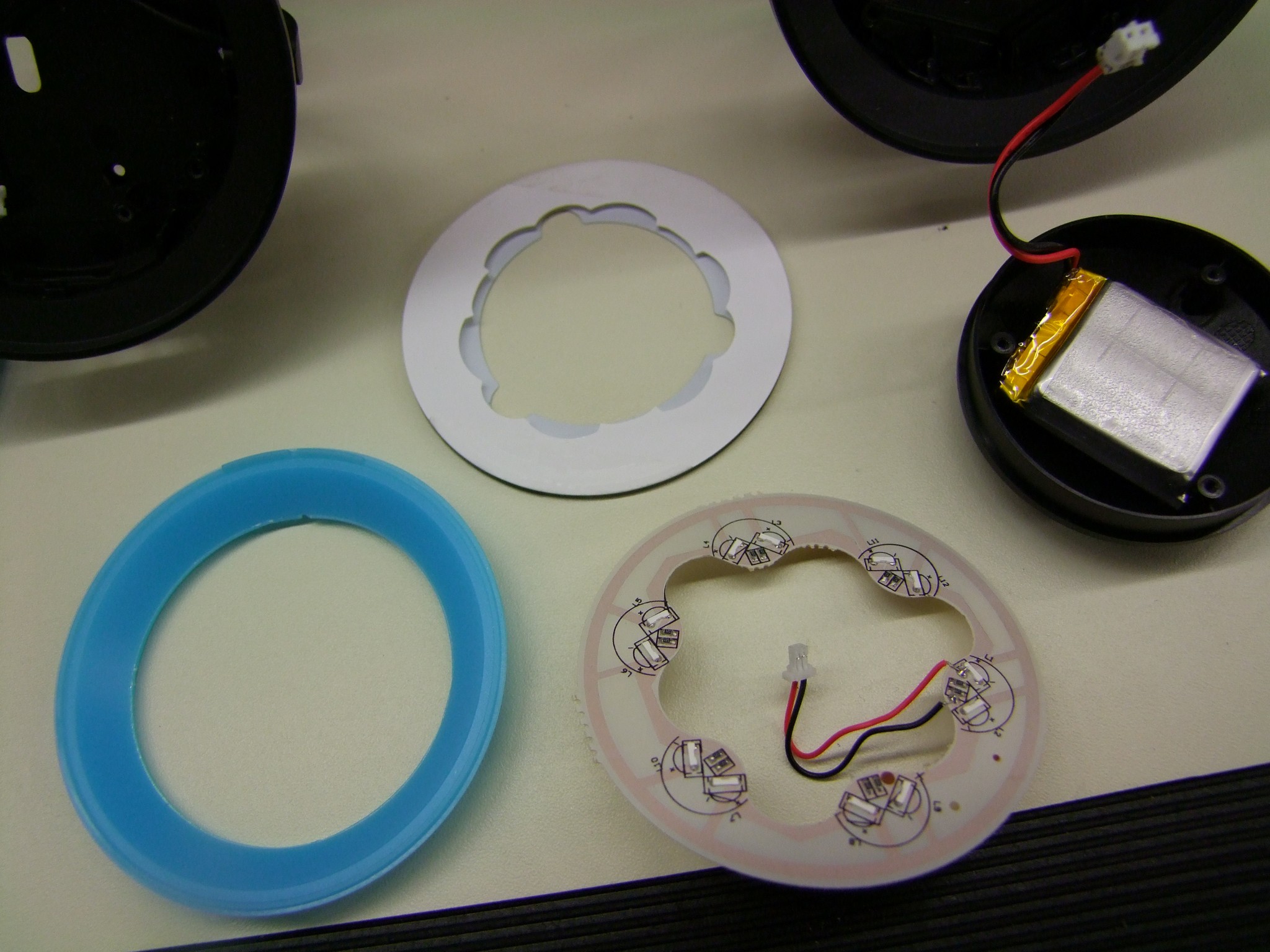
The LED board is smooth white on top and made of two pieces – the printed circuit board with the LEDs is mounted to the white ring, which is a light-diffusing plastic like what would be used on a LED backlight. This softens the glow and prevents you from seeing discrete LED dots.

A little prying and the printed circuit board comes off. The LEDs are a unique side-emitting package instead of the far more common top-emitting type. The LEDs fire into the internal face of the light-diffusing plastic, causing the ring to glow very evenly.
This thing has become more hardcore than I had anticipated. I was thinking that there would be an easy way to change the color of the LEDs if needed. Not so much with these – they likely chose white since it can be slightly filtered by the color of the accent ring into any of their colors. Add to that the oddball package needed and your choices are limited.
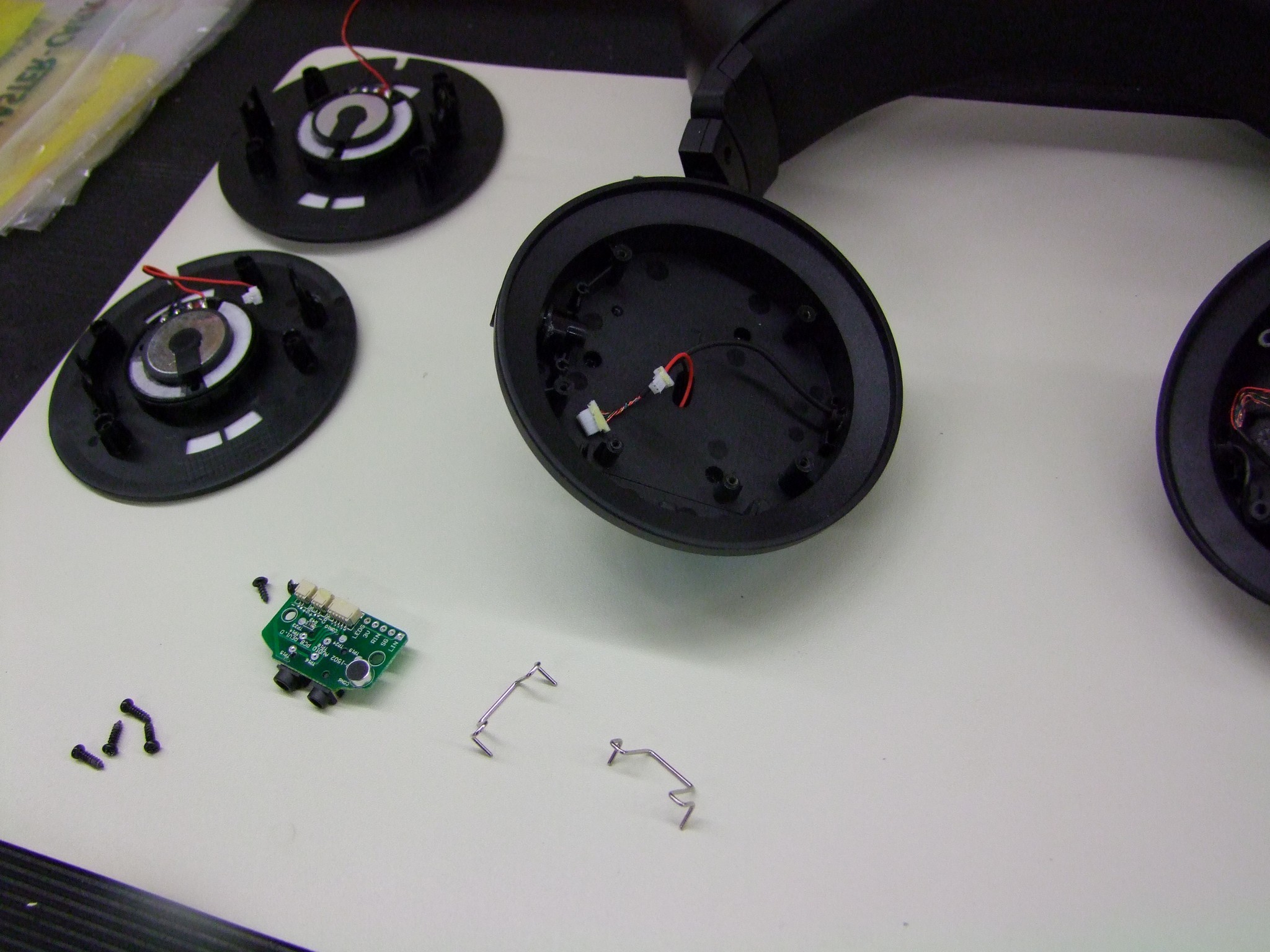
The three components of the lighting accents… or Axents, if you will.
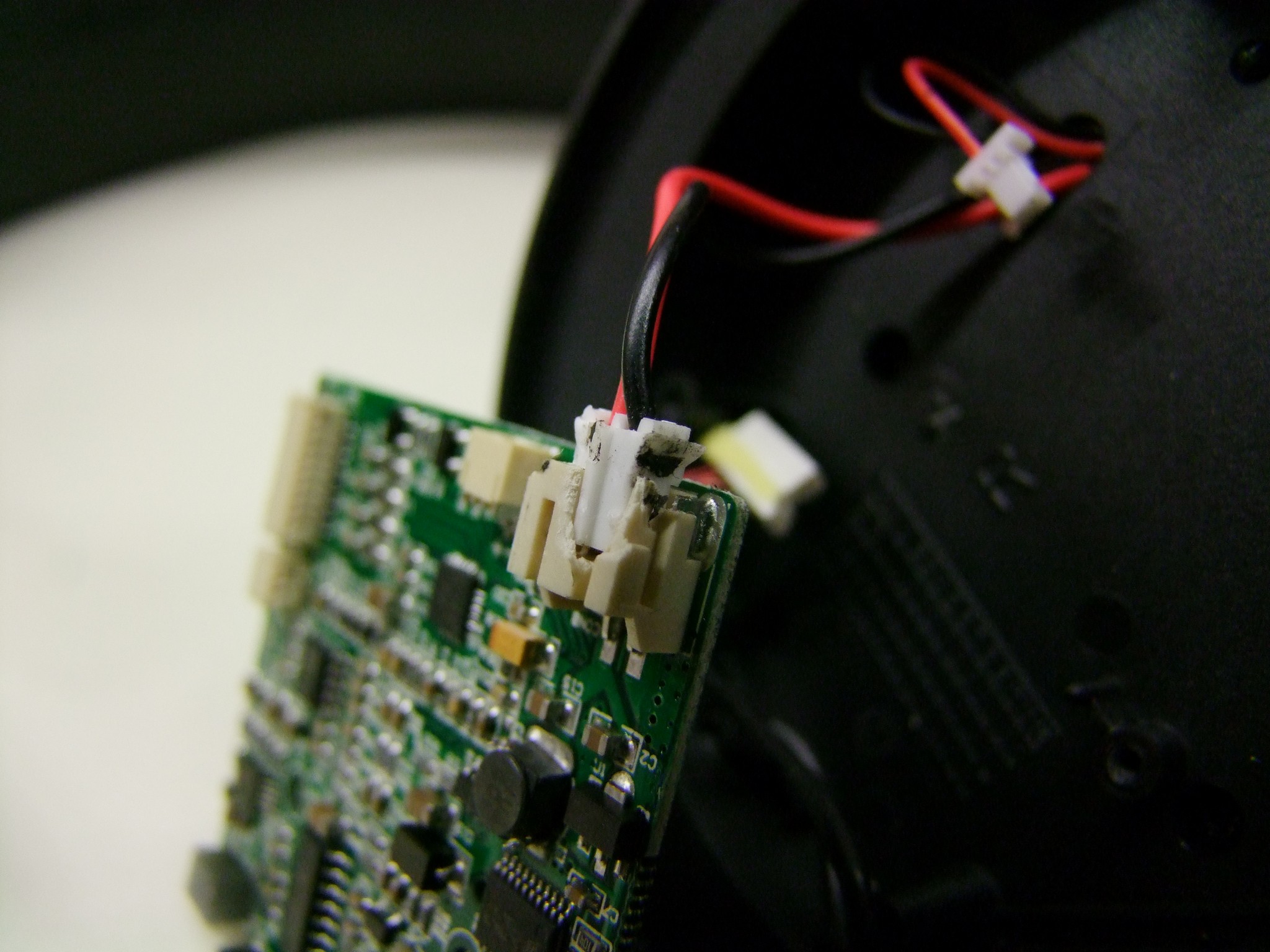
Moving to the larger board, the amplifier board – I damaged the battery connector trying to remove it. It’s held in place by a very one-way snap/detent, which I broke before getting the connector to back out. It still contacts fine however. Your experience may vary.
The other connectors are secured by a small amount of adhesive, but this comes off readily.
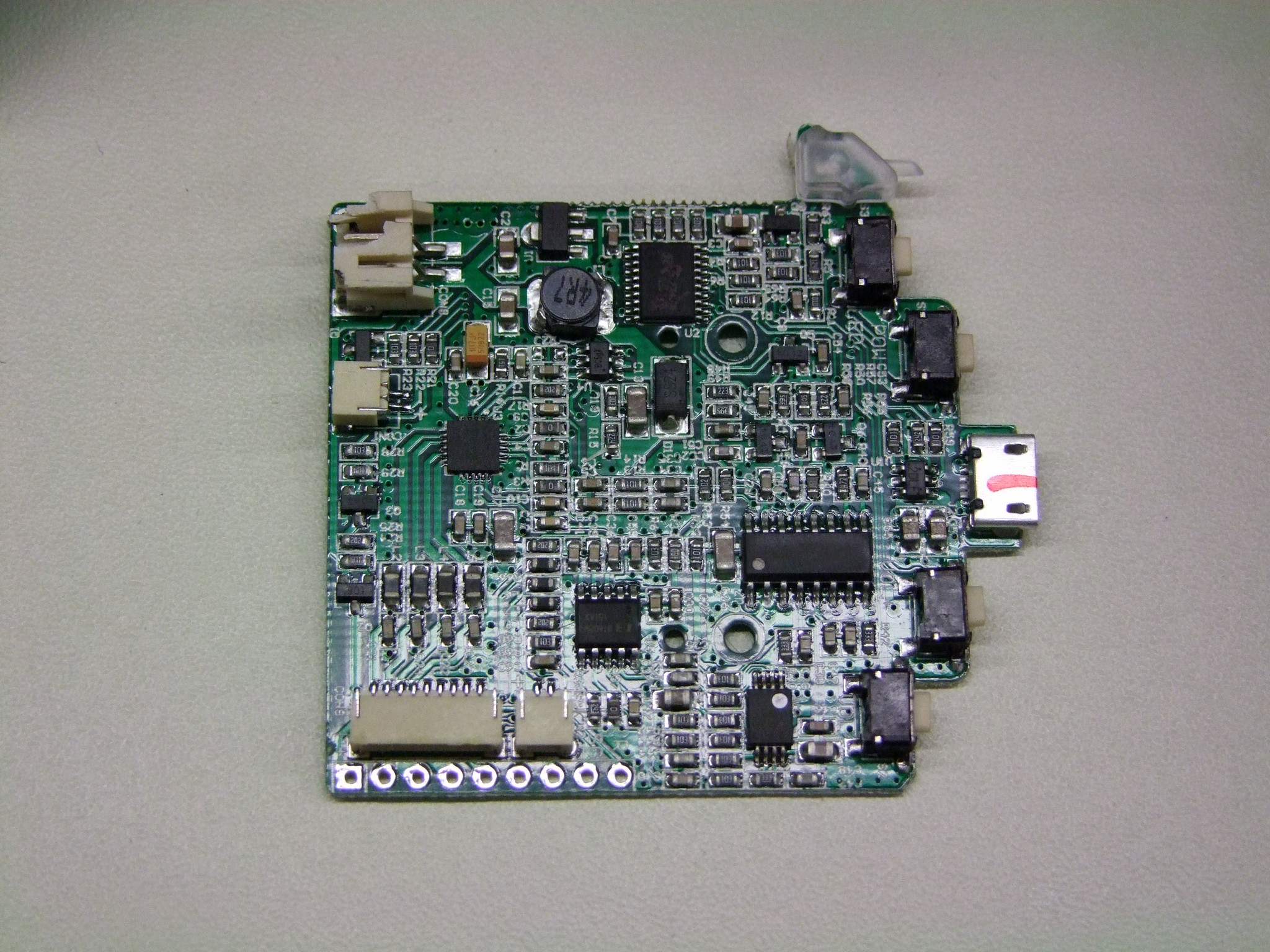
The amplifier board! I wish I could say something about its design, but it’s not a motor controller. I’ve not worked with audio ICs in the past, so unlike said motor controllers where I can tell you whether or not it’s worth using, the specific implementations of the ICs used are lost on me. All I know is it cannot flow 500 amps.
I played with searching for their datasheets, however, and in doing so I discovered that some of these are pretty damn obscure. As in, no English-language results worth following up on. I actually had better luck hopping on a Chinese search engine like Baidu. The vast majority of results regardless were trading websites, not manufacturer’s datasheets or similar, and they all claim ORIGINAL PART!!!! like it means something. It seems like a lot of these chips are genericized and made by many factories for myriad applications, so you just pick one off the cloud. The same phenomenon gave us Seg-things.
The major ICs listed, which I could track down anyway, are…
- CSC8004 – SOIC-16 package, some kind of 2-channel amplifier. I could only find a datasheet for the 8002, but I assume the 8004 is just the 2 channel version of it.
- TPA2017D2 – 20QFN package, a Class-D 2 channel amplifier. If I had to guess, this one drives the external ear speakers, since Class-Ds can push more power with less dissipation and the ear speakers do get quite loud.
- SC51PS704 – an 8-bit microcontroller. Looks like one of many different 8051 clones – similar 8051 clones are used in a lot of Chinese e-bike controllers. So few pins are actually connected on it that I think it only handles button presses.
- BT608M – this was the single hardest thing to find. There’s lots of places trying to sell it to me! When you start getting into places called “ICMiner” or “Ic-ic.com”, that’s when you part is obscure-ass. It’s also apparently a model of hospital bed, and Bluetooth-compatible speaker system. If I stopped searching early, I might have assumed it’s some kind of unimplemented Bluetooth hardware (but why even populate it then?). But I don’t think so – based on various side-channel mentions of it, such as this spammy blogpost, and this short title, I am led to believe it’s involved in the button-controlled volume for the ear speakers. If you can find this datasheet, you are better than me.
- NJM2100 – a dual op-amp, SSOP-8 package.
Since these units are made in Taiwan and commissioned by a big company like Brookstone, I assume they have their entire network of Chinese parts traders which I realistically have no handle on at all.

The housing on the right-hand side contains a similarly shaped though not completely identical LED board, as well as a small battery in the hollow portion of the black cap.
The right side LED board taken apart. This one has more markings!
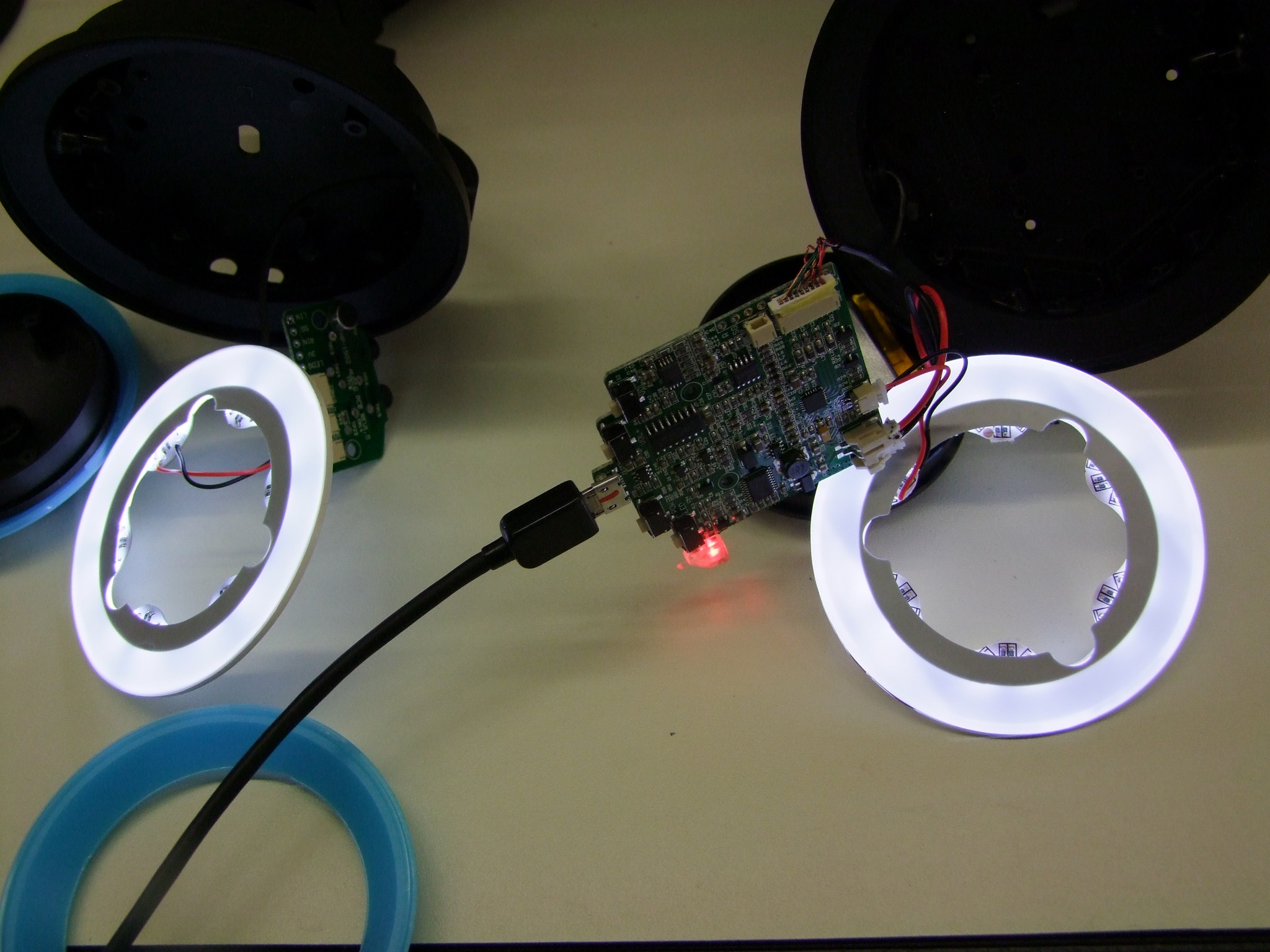
I temporarily hooked both back up to check for differences in light output and the patttern, but they function pretty much identically. By the way, as soon as you disconnect the battery, the system will not arm lights or external sound until you plug it into USB power at least once.

The ratings on the battery are obscured by a bit of rubber tape.

Scraping it off, you can see that the battery is 1.0Ah. Assuming you don’t crank the ear speakers at full tilt, this should last for several hours of using the lighting and ear speakers together. They claim 5 hours – I haven’t verified this yet, but some rough calculations – 3.7V * 1.0Ah is 3.7Wh nominal, of which 80% is typically available (assuming it lets you drain the battery to 20% SOC, divided by 5 hours gives an average usage of 0.6 watts. Plenty of sound for you and probably the people in your immediate vicinity.

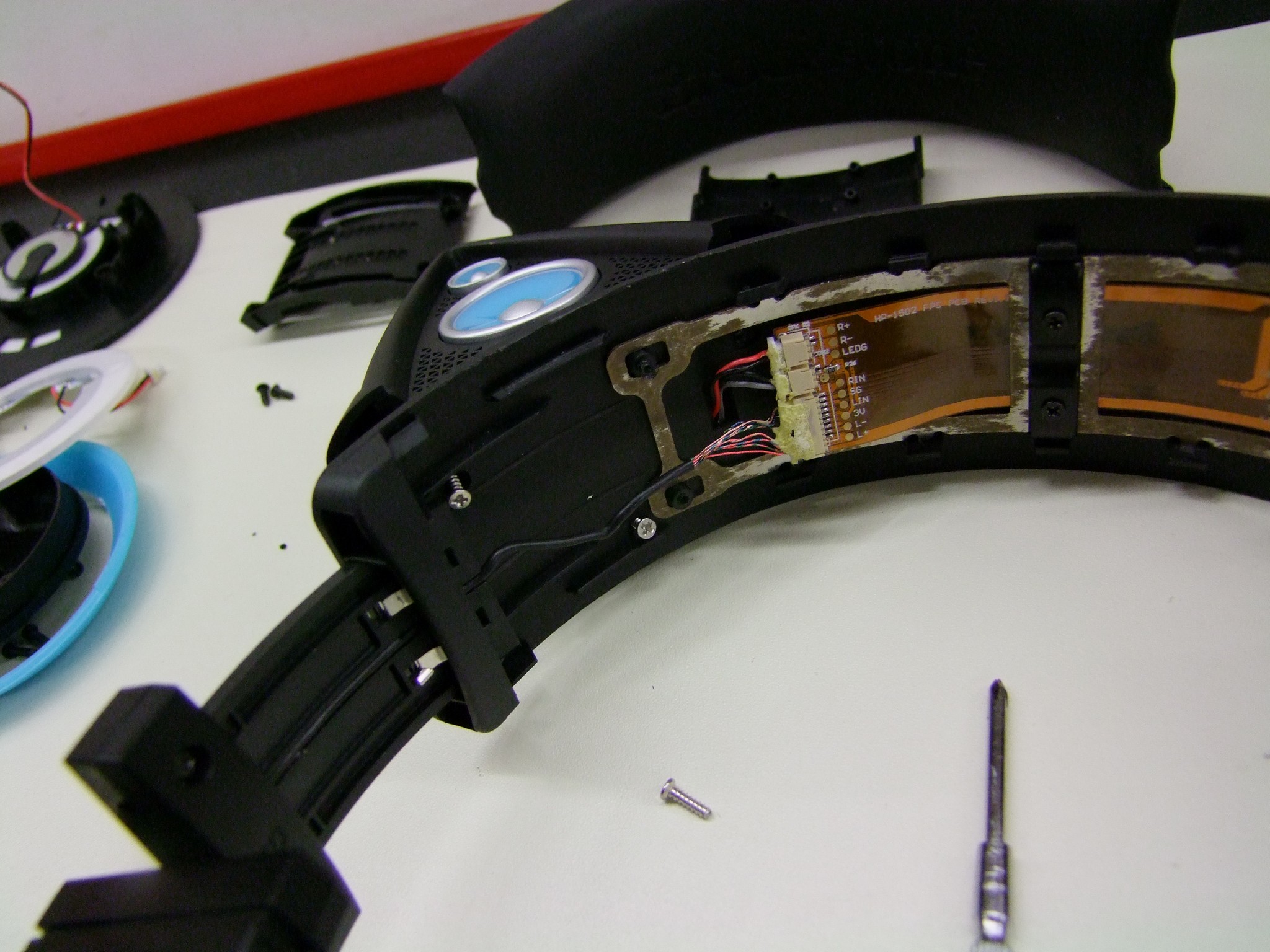
None of this solved my lighting woes, though. The next step was to disassemble the headband to see how the signal cross from one side to another.
I’ll get this out of the way right now: I hate snap-fits. Hate everything about them, but they are the go-to these days for consumer products because of less parts cost (no hardware). But they’re generally one-way only – you try to dismantle them and they usually, you know, snap. Those that don’t just break off you can usually only get very limited assembly-disassembly cycles before they no longer hold.
That being said, the headband is held on by 18 terrifying snap-fits. Four are at the corners where the headband ends inside the little plastic bezels – pull those upwards (in the shown orientation). The headband itself has 10 snaps that pull towards the center of the loop:

And the method of transmission is revealed. A ribbon cable! Seemingly a somewhat fragile ribbon cable. I hooked the lighting back up to see if any joints here were loose. It seems like the very act of manhandling the ribbon cable area trying to undo the snap-fits fixed whatever the issue was, because now I had both sides of lighting again.
Okay then.
From website reviews, it seems like some times there are issues with one side completely losing functionality. I suspect an issue with either this ribbon cable (I also hate ribbon cables, but just a little less) or the interconnects between it and the left- and right-housings – tiny cables made of braided Litz wire which is enamel-coated. This strikes me as being rather fragile, though most audio signal cables I have seen are made of this wire.
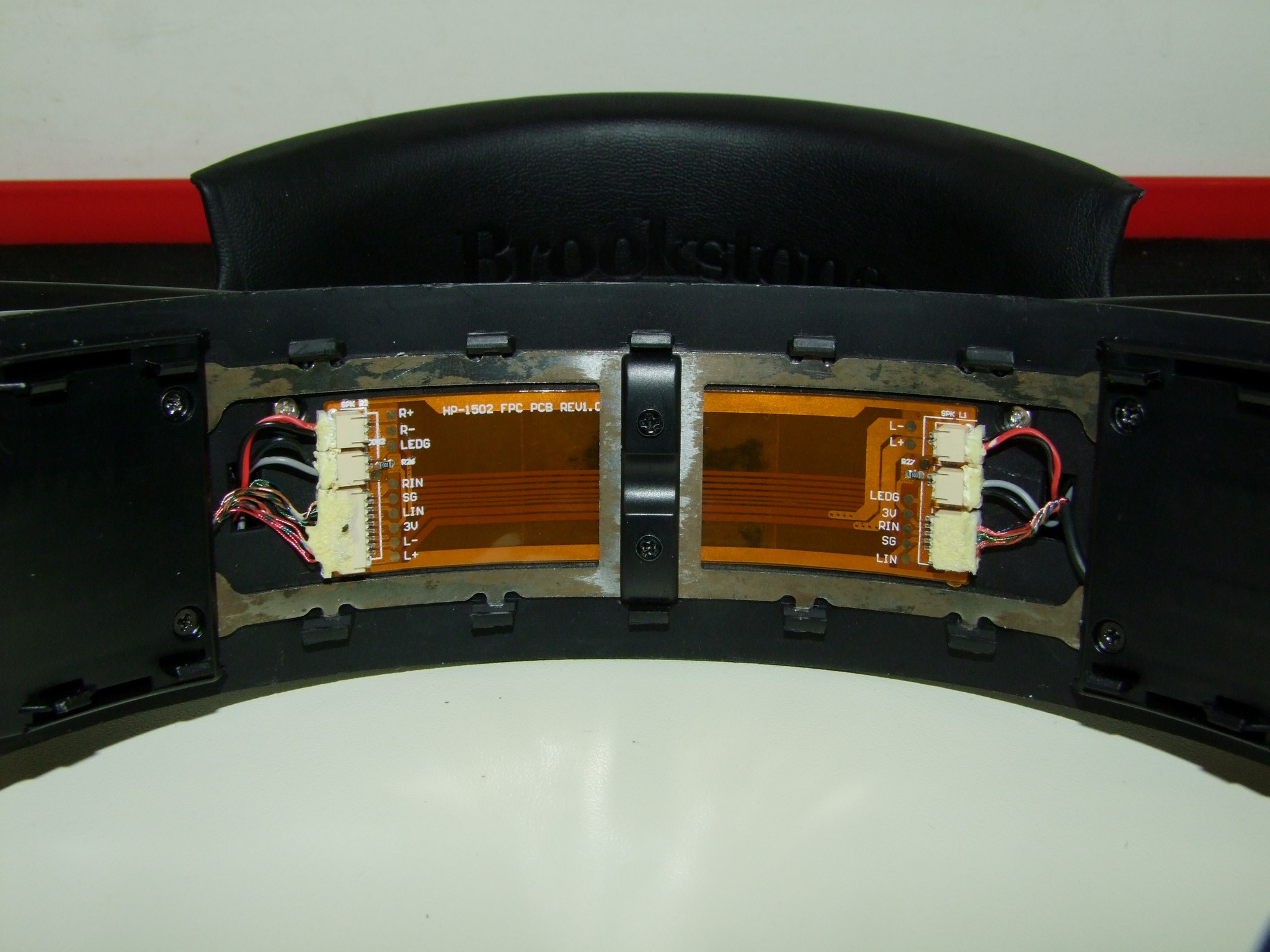
A closeup of the ribbon cable. This is oriented with the inputsside to the right.

Alright, as long as I’ve gotten this far into it, let’s keep going and see what the ear speakers look like. To get to its mounting screws, there is a plastic cover which has two screws that needs to be removed. This piece is the “detent” surface for the headband adjustment, which generates the clicks you feel when you pull on it. It then slides up and away.
Three silver screws attach the ears. Two are directly accessible, the other one requires you to mash against the R+/R- connector pictures above a little bit.

Here is an ear!
After some prodding, I found that the bottom is held in by two small snaps which are easily released, but the top appears to be a plastic snap rivet which, predictably, snapped. Its wreckage can be seen at the top of the ear.

The ear speaker is a cute little 1″ driver encased a small bucket that is sealed with a ring that has some foam tape. The back of the bucket is open, but the ear is still a very small enclosure. The ear speakers sure sound like small speakers in a small plastic enclosure, like most Bluetooth speakers I’ve had the pleasure of experiencing – a ton of midrange, and not much else, muffled and tinny at the same time. An audiophile I am not.

The depth of the ear speaker.

The ear accents are constructed like the ones on the headphone housing, using side-emitting LEDs pointed into light-diffusing material. The blue speaker icon is a separate piece and easily removable.

I peeled back the rubber compound holding the LEDs to the diffuser. There’s only two LEDs here.

So there you have it! Now I have no clue how to put this thing back together! Hey Brookstone…
I hope you’ve enjoyed this tour of what a modern consumer electronics product basically looks like – lots of molded plastic, snap fits, and housing little printed circuit boards. I feel like they still have a few little quality issues to overcome, but in general the amount of effort that was put into these was beyond what I expected.
That same level of effort also makes these things much harder to modify, as I had said at the beginning. Why would I be thinking of modifying them though!? That’s because of….
#Season2, Or: BattleBots, the Anime?!
I’ve been throwing around this false hashtag #weeabot on purpose for a little while now (false meaning I don’t ACTUALLY have a Twitter or Instagram or Tumblr account where tags actually, you know, matter – I consider Facenet hashtags to be kind of vestigial) on places like r/battlebots or the BB official pages. Anyways, what it embodies is my continued unstated, half-assed life goal to increase the intersection between engineering and anime. Put simply, there’s just not enough of it – at least in meaningful ways. Just like I like my science fiction rather high up on the hardness scale, I like my engineering depictions somewhat plausible. This in general never happens.
I also have a desire to offer counterpoint to the likes of Kantai Collection, which has (in my opinion) completely ruined the mecha musume genre. I like girls and machinery, and consequently girls with machinery, but Kancolle’s character designs essentially have nothing to do with the machinery. You don’t just weld battleship parts to a schoolgirl archetype and try to sell it to me. And the worst part is, it’s spawned endless look-alikes which have the same problem. It’s gotten so bad that even Toyota has started doing it. That’s truly when your genre jumps the shark*.
I can’t not say IMPOSSIBRU, sorry.
To matter the reason, if I don’t like anything on the market, I tend to make my own. RageBridge (and RageBridge 2) was a direct response to how much other motor controllers in the market segment sucked (AND STILL SUCK).
Now, an artist I am not, but luckily I have the help of the magical and talented Cynthia, who also brought you Arduino-chan as seen here last year. Besides returning again to help with the fabrication and electrical work for next generation Overhaul, she will also be creating team cosplays uniforms designs, as well as an “Overhaul character” in the vein of the mecha musume series and the, umm, Priusettes, which you loving and adoring fans may cosplay as in the live audience! One that doesn’t suck.
Here is a preview of things to come…

So there you have it. While I’ll be cranking on making OH2 hypothetically easier to service, faster, and more reliable (read: less fail), she will be making the brand. A robot TV show is about more than just the robots, after all. And especially in this day and age, you won’t really know what becomes popular due to the Internet Hype Machine ahead of time, so perhaps this is an exciting new direction. Hell, if all goes well, we’ll have a character for EVERY #SEASNON2 entry – there will be surely something for everybody.
And lastly – so why did I feel the need to “mod” the Axent Wear? Because the shade of blue doesn’t match the new “team color” (and robot thematic color) for OH2, digital goddess and “That girl Charles has a sticker of on everything he owns” Hatsune Miku:

Of course it’s a Miku-van
It’s more of an aqua/cyan color, which involves a wavelength of LED that is not common at all, much less in sideshooter package. What I’ll probably just do is 3D print translucent-white accent rings (the currently blue parts) and coat them with something that is more aqua. (To my knowledge, nobody makes an already-translucent aqua/cyan 3D print filament).
Oh yeah, definitely expect the whole bot – however it ends up looking – to be plastered in character stickers and corresponding thematic paintwork. Since Miku is a copyrighted character, it will probably be whatever the OH2 character ends up as. I have a few places that can provide the necessary vinyl graphics.
And finally, for something vaguely robot related…

Those are rubber bumpies, similar to the ones used on OH1 but smaller and more numerous. Yum, bumpies. All shall be explained soon – I have over sixty design screenshots of OH2 to write up as soon as I’m more than 90% sure I won’t get kickb&4lyf for doing so.









