I don’t have enough time during the weekdays to get into any serious work on the bots, but I still do little tidbits here and there since I pass through MITERS more than I should. Ãœberclocker edges one step closer to completion today as I bootlegged in the arm parts on some 1/2″ aluminum plate. This time, the waterjet did not epicly fail, and so I now have proper starting material to finish the fr0k.
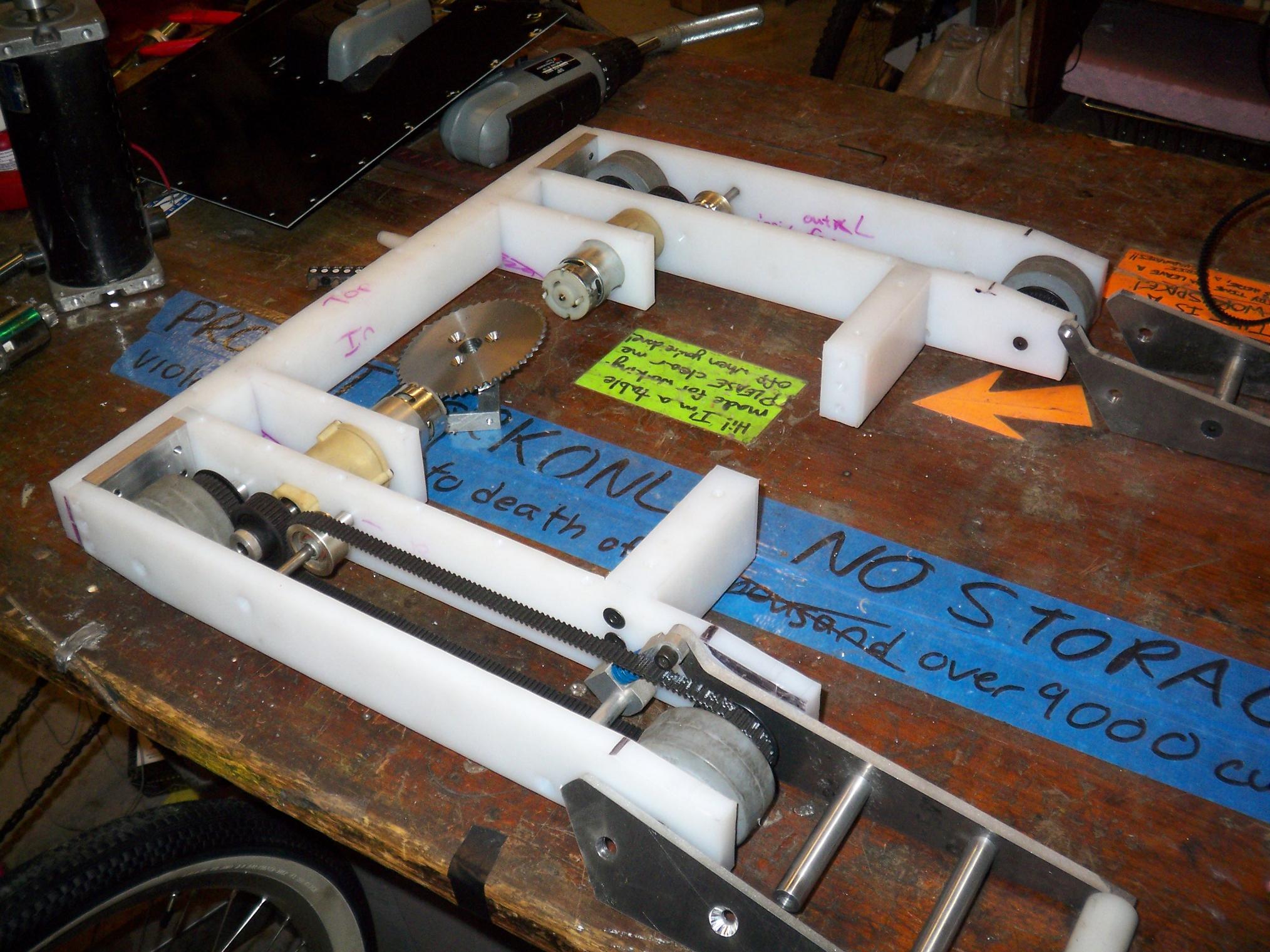
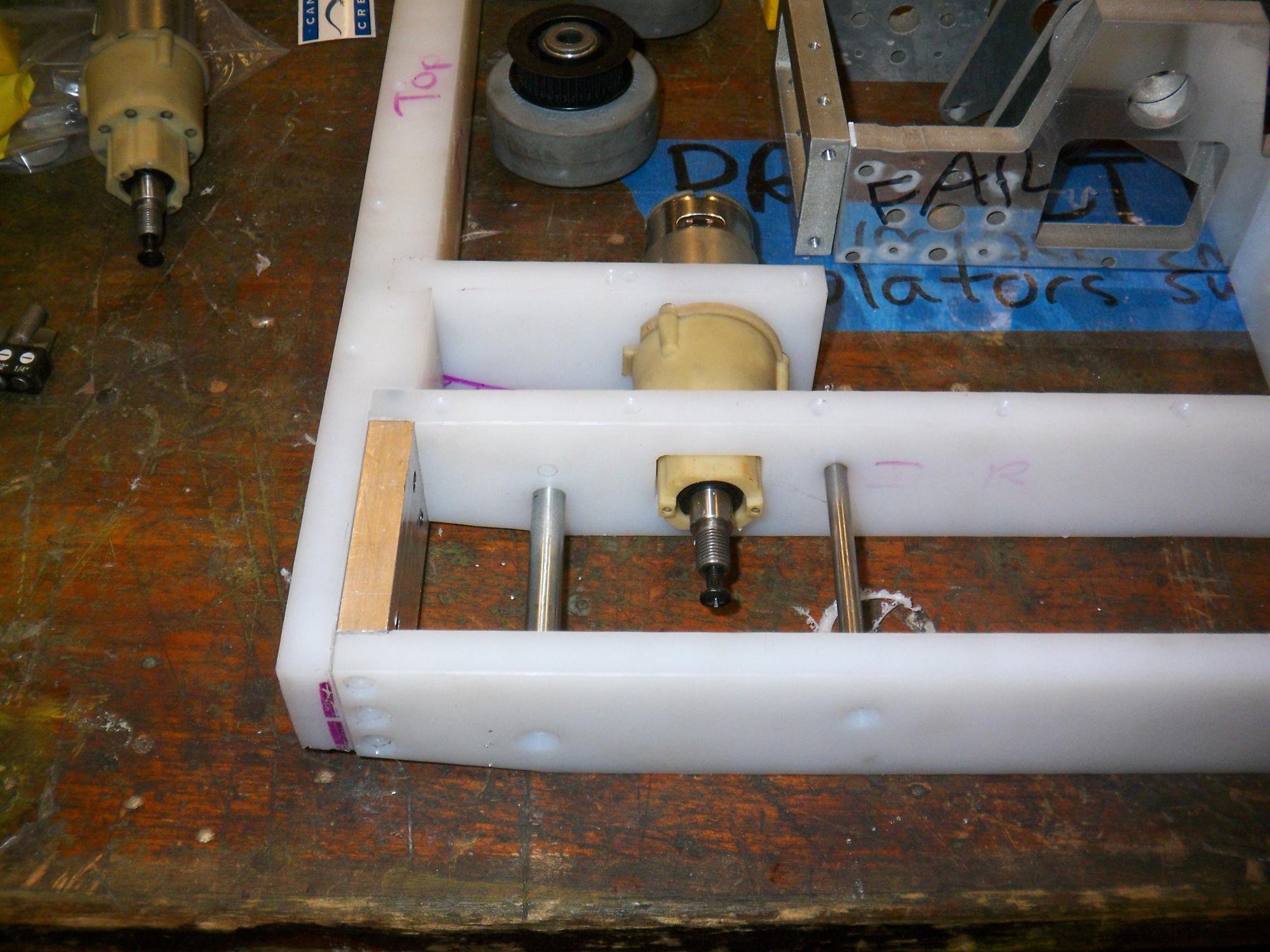
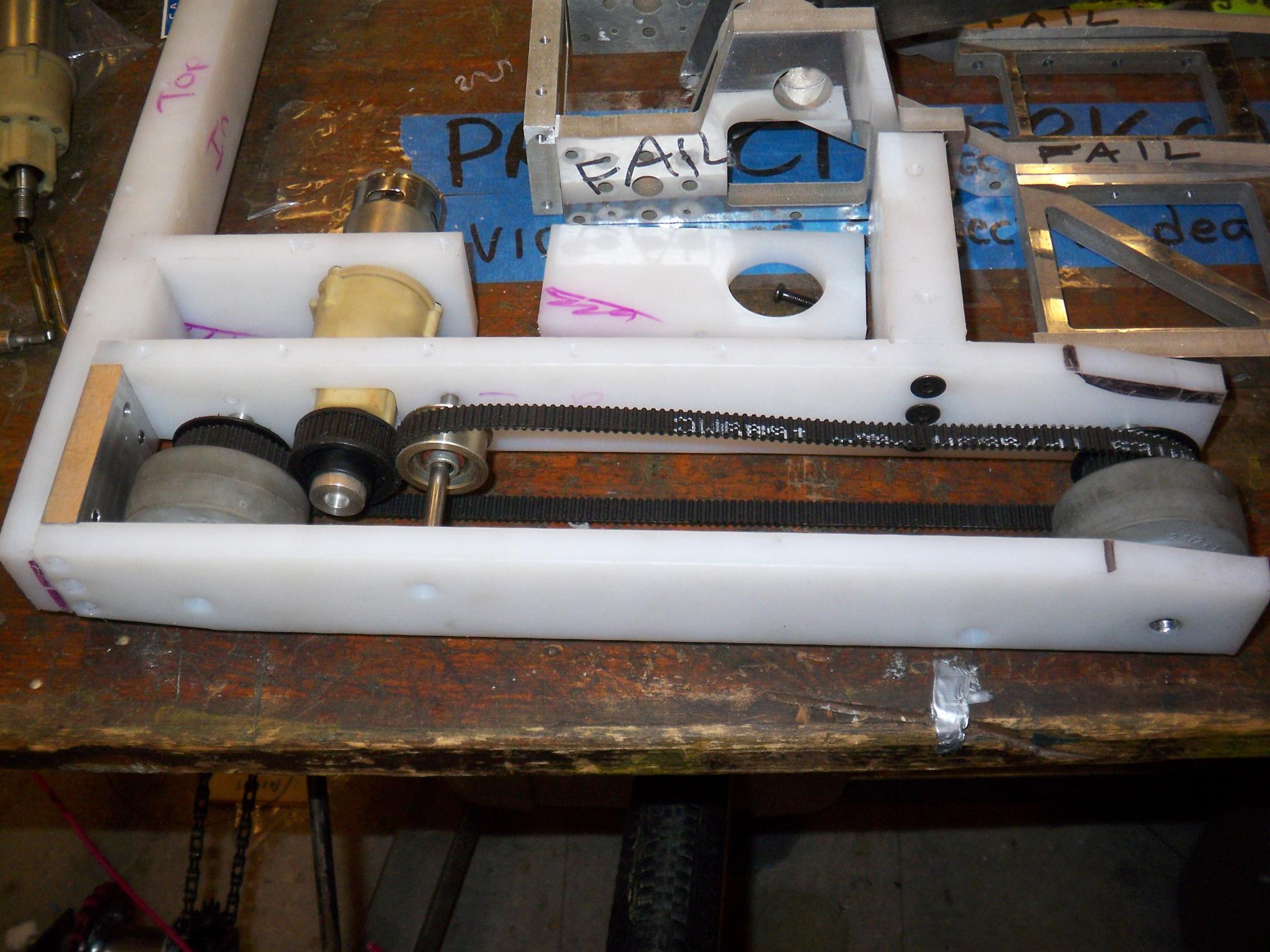
The frame finally stands on all four wheels! About time, too. It’s missing a shaft collar here and there, but a run to the hardware store will solve that. I’m also waiting on a bag of springs from McMaster such that I can finish the left side. I’m satisfied with the belt tension around the rear now that I have modified those rollers to fit on the tensioner axle, but there is of course some stretch and play in the long run to the front wheel.

One design feature of this bot that I think will come in handy at Robot Battles is the 10 degree rear bevel. Even though it was an enormous pain to machine, it allows the bot to tilt backwards over 45 degrees without losing traction – unlike my other rather low-riding bots, which are toast if they crawl onto another wedge. It still doesn’t beat the bots that have fully exposed rear wheels, but that wasn’t compatible with the body geometry.

Non-fail parts. They’re not shiny mirror aluminum nor are they actually .5″ thick (more like .515″ – it’s that weird-ass neither-metric-nor-imperial aluminum again!), but at least they have the holes in the right places. Thicknesses can be reduced, but I can’t move an entire regiment of failholes.
These parts only require minor postprocessing like threading, slotting, and counterboring.

So I lied – there was one failjet part, but it was due to my own idiocy of not tightening down the head height adjust, so the cutting head was bobbing around every time it fired. Oops.
What do you do with three almost-identical shiny metal things that can’t actually be used? Door decoration. This trefoil-like thing now adorns the MITERS front door, along with a giant epic sprocket.
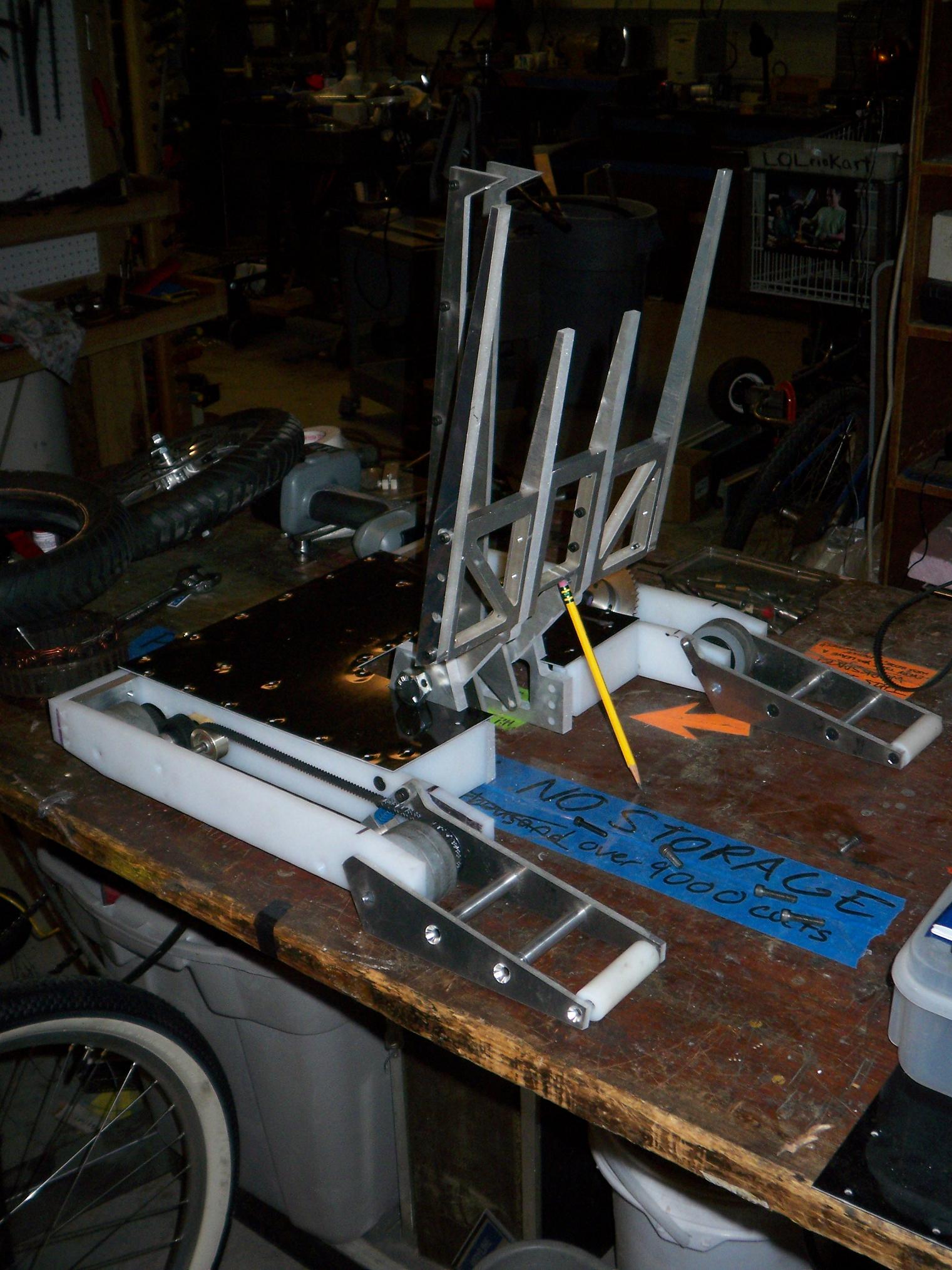
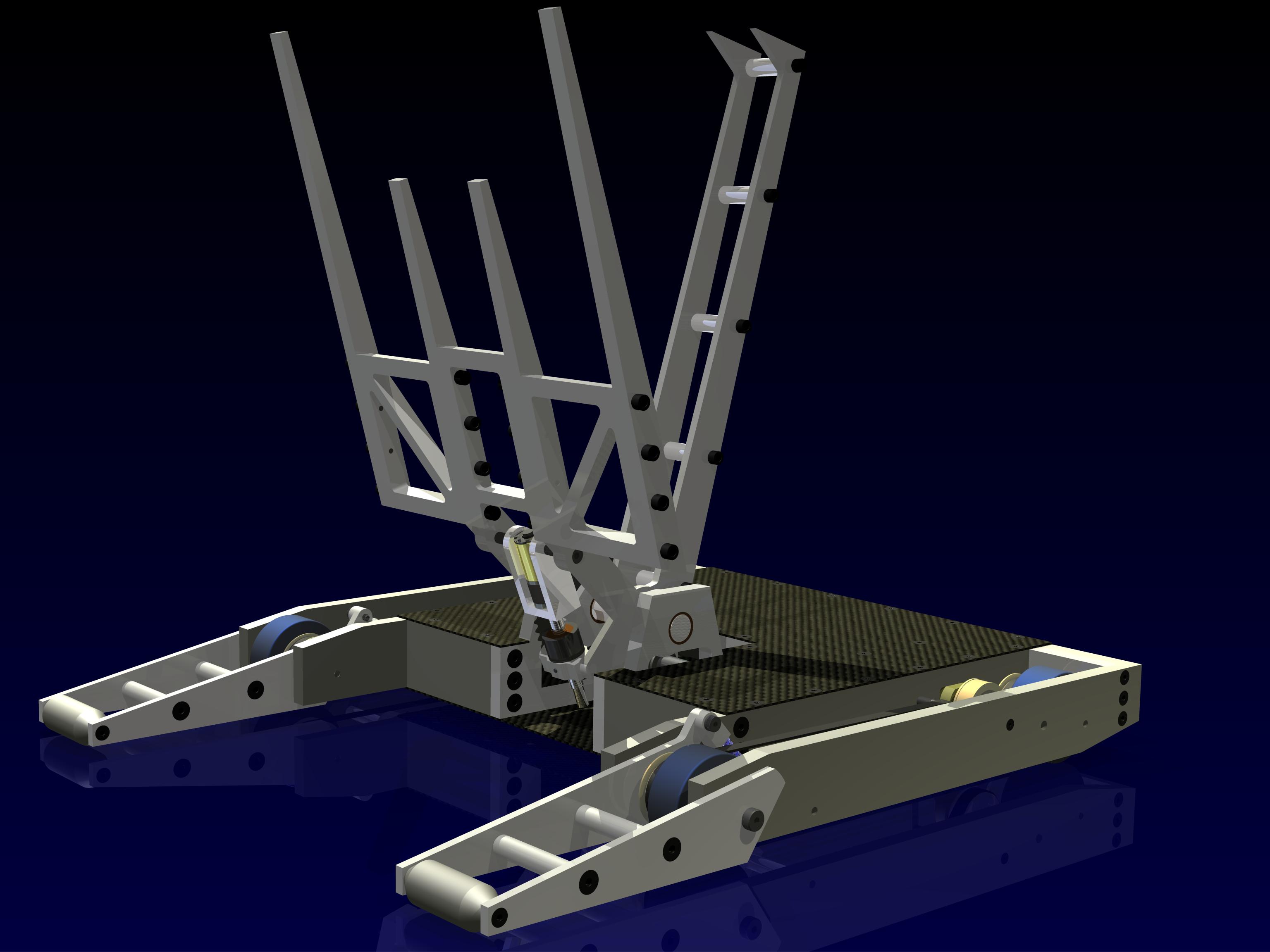
So with all the fr0k proto-parts fitting properly, it was time to prep Ãœberclocker for its first clampbot salute. Slightly rigged, of course. In the background of the picture lurks the fr0k sprocket, which I have bored and drilled, but not yet finished facing. I hope to have the real assembly up and running some time by the end of the weekend.
Weekend? Why yes, it’s almost the weekend. After I emerge from the bowels of MITERS again, I’ll post more pictures. I’ll probably be trapped in there for a good while, since we got yet another toolgasm today.









{kind=link}
{kind=link}