New plan! Again!
Due to some unforeseen characteristics of the Banebots 12-45, my plan of adding thermal mass to the electronics bay won’t work out, at least not without more precision engineering than I am willing to put up with. This coupled with additional budgetary concerns means that I’m keeping the Victor 884s. There’s nothing wrong with them, and they are in fact very good controllers. However, the reason I wanted to move away from them was due to size issues – they’re not exactly compact.
But most of the time, big and beefy lasts the longest and is the most reliable. Here’s a temporary drawing of what the new internal arrangement will look like. I have yet to model the mounting plates.
 This is roughly the same as in MCE – battery, power switch, and arm controller (the Syren 25 is staying) on the right side, and the drive controllers and receiver on the left. With increased space in the middle of the bot, I can mount the Victors longitudinally as shown, but there is really no advantage to it as the arm controller wouldn’t fit in the space between them and the drive belt. So to free up space for wiring, I might just keep the widthwise mounting of the 884s.
This is roughly the same as in MCE – battery, power switch, and arm controller (the Syren 25 is staying) on the right side, and the drive controllers and receiver on the left. With increased space in the middle of the bot, I can mount the Victors longitudinally as shown, but there is really no advantage to it as the arm controller wouldn’t fit in the space between them and the drive belt. So to free up space for wiring, I might just keep the widthwise mounting of the 884s.
I hate scaling back the Grand Master Plan, because now there really is no upgrade besides a lithium power system and possibly higher grade alloys for the wedge and arm – “possibly” because higher grade alloys cost more, and so that planned upgrade might not happen either.
Whoopee. Now that SP1 is looking more like a bugpatch, I’ll unveil the latest Team Test Bot vapor design.

Trial Bot 1.0, way back in 2005, was my first attempt at building extremely low bots. It was an overhead horizontal kinetic weapon design, an inverted lawn mower design (even had a 22″ lawn mower blade). At the time, it had ground-to-blade height of 2.25 inches, which was obnoxiously flat, but suffered from a multitude of engineering problems: low ground clearance made worse by non-countersunk chassis bottom screws, an unreliable friction drive mechanism, and a tendency to become unbalanced and ping itself.
With the wide-scale commercialization of high-performance lithium polymer power systems and brushless motors, I can do much better.
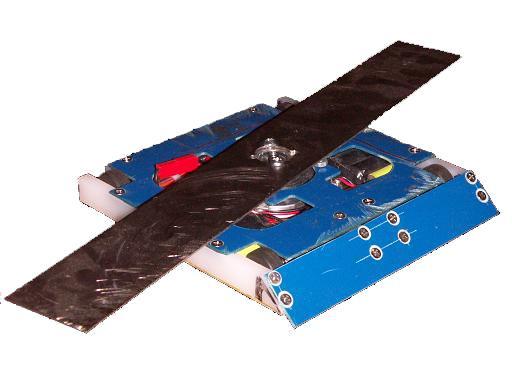
 Yes, that’s right, a ground-to-blade height of 1.6 inches, which, numerically, is smaller than most bots’ wheels and right around TB’s three-quarters mark. The chassis is 1.125″ thick, and was designed to be aluminum, since UHMW of this thickness would be unbearably floppy. This is only possible with customization of just about everything. The frame is thin enough to be made as one piece using an abrasive waterjet with draft compensation. Notice the ersatz-tank tread drivetrain, which gives the effect of “4 wheel drive” without needing a separate belt and pulley assembly. This will be accomplished using urethane round belt, like NK, or some really big o-rings. There are three on each side for redundancy, but I don’t doubt the bot can just take off and land somewhere using the blade if the drivetrain is disabled.
Yes, that’s right, a ground-to-blade height of 1.6 inches, which, numerically, is smaller than most bots’ wheels and right around TB’s three-quarters mark. The chassis is 1.125″ thick, and was designed to be aluminum, since UHMW of this thickness would be unbearably floppy. This is only possible with customization of just about everything. The frame is thin enough to be made as one piece using an abrasive waterjet with draft compensation. Notice the ersatz-tank tread drivetrain, which gives the effect of “4 wheel drive” without needing a separate belt and pulley assembly. This will be accomplished using urethane round belt, like NK, or some really big o-rings. There are three on each side for redundancy, but I don’t doubt the bot can just take off and land somewhere using the blade if the drivetrain is disabled.
 At the center of it all is a very large brushless outrunner motor, similar to Pop Quiz – in fact, PQ was built to test the viability of direct drive weapon motors in larger bots. As designed, this motor weighs almost 3 pounds and has alot of solid metal on it. The mount also attaches directly to the bot frame to make the whole assembly as stiff as possible. A copier motor will supply the stator, which will be 70mm in diameter by 20mm tall. Motors of this size are commonly used to fly model airplanes weighing 20 to 30 pounds.
At the center of it all is a very large brushless outrunner motor, similar to Pop Quiz – in fact, PQ was built to test the viability of direct drive weapon motors in larger bots. As designed, this motor weighs almost 3 pounds and has alot of solid metal on it. The mount also attaches directly to the bot frame to make the whole assembly as stiff as possible. A copier motor will supply the stator, which will be 70mm in diameter by 20mm tall. Motors of this size are commonly used to fly model airplanes weighing 20 to 30 pounds.
Note the triangular cutout at the back. This is a by-product of designing the bot with a base size of 12 x 12 inches, common to all of my 12lbers. However, this leaves most of the interior empty because of more power-dense, hence smaller, components. The bot can be shrunk to 10 by 10 inches easily and make more efficient use of the space as well as free up weight (for a bigger blade!), but I’ll worry about it when I actually have the ability to build it.
It’s fun thinking about future designs, but 2008 is approaching and I need to get to work on SP1 – the parts pile is condensing from the bot-aether.


{kind=link}
{kind=link}